

Finger exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of high price, single function, and unintegrated sensors, and achieve the effect of compact device structure, low manufacturing cost, and small footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
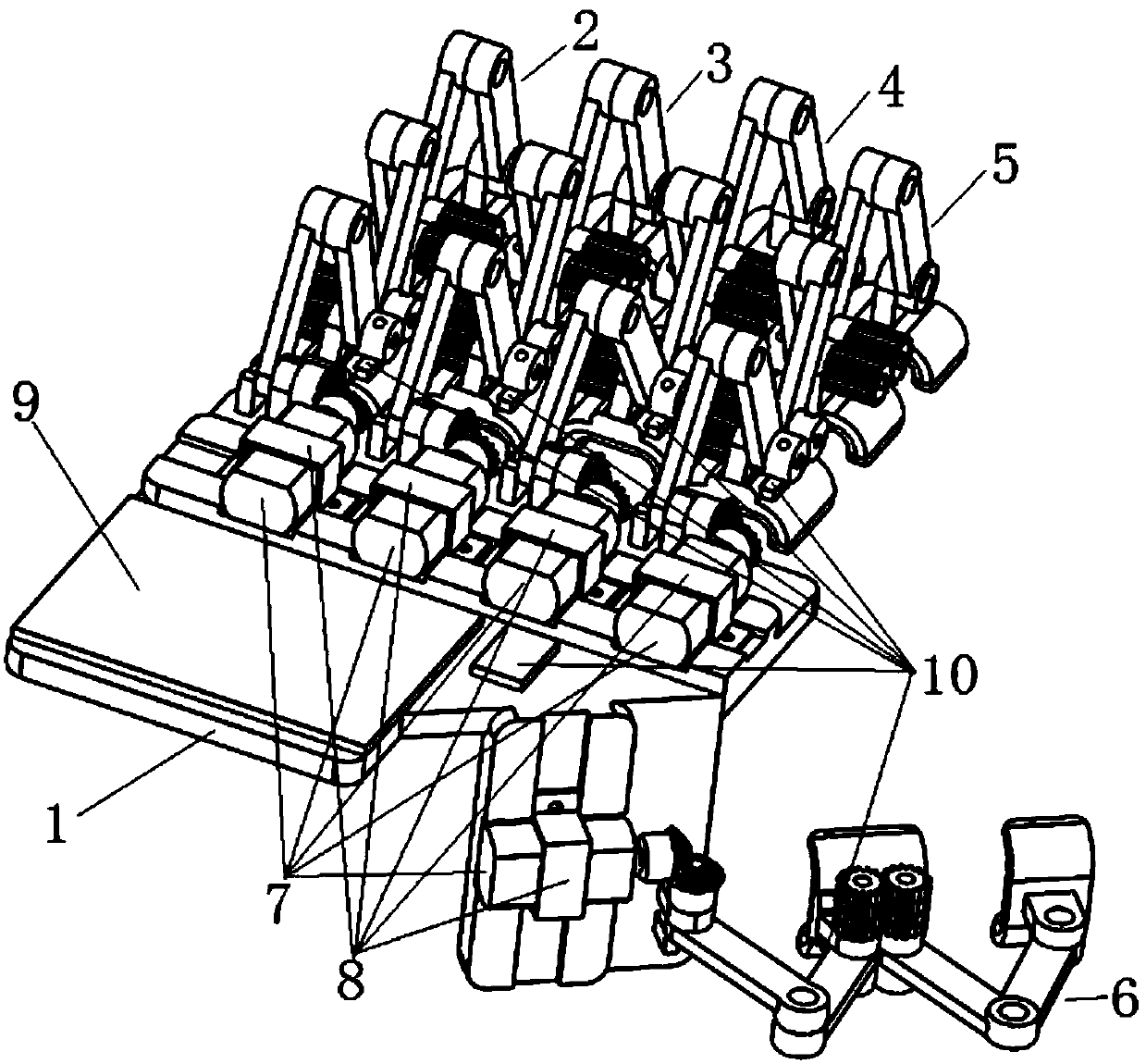
[0043] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
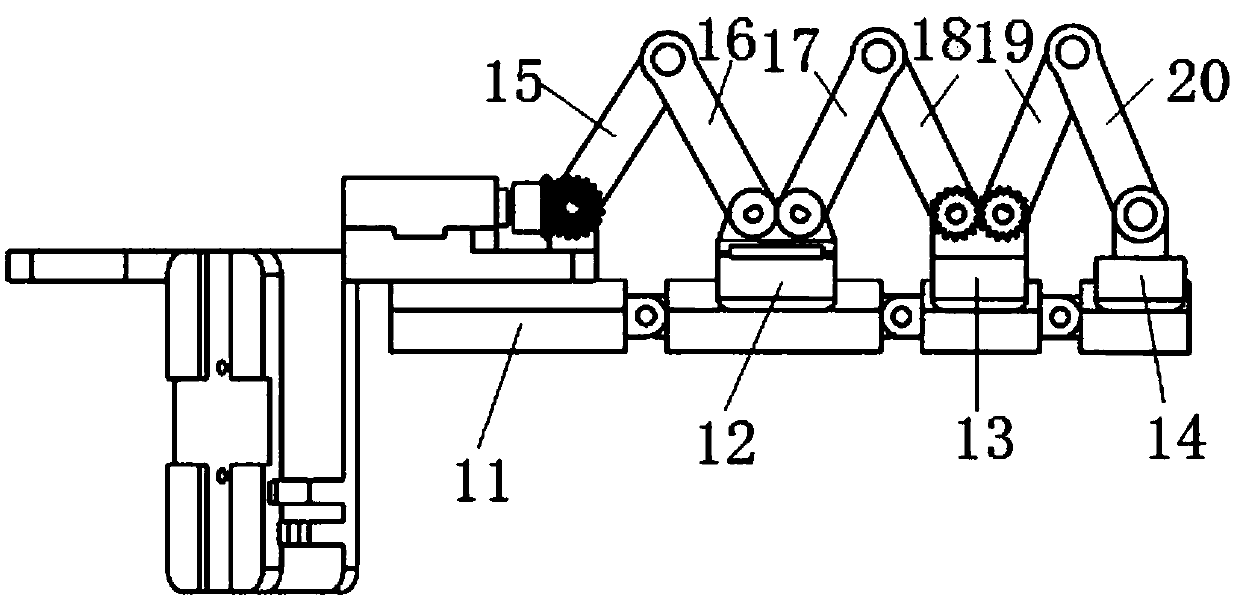
[0044] Such as Figure 1-Figure 11 As shown, the present invention includes the following feature parts: 1 is the back of the hand mechanism, 2 is the little finger mechanism, 3 is the ring finger mechanism, 4 is the middle finger mechanism, 5 is the index finger mechanism, 6 is the thumb mechanism, 7 is the DC motor, and 8 is the motor fixing frame , 9 is the circuit board, 10 is the sensor, 11 is the human hand model, 12 is the proximal knuckle module, 13 is the middle knuckle module, 14 is the far knuckle module, 15 is the first connecting rod, 16 is the second connecting rod, 17 18 is the fourth connecting rod, 19 is the fifth connecting rod, 20 is the si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More