

Human hand and dexterous hand coordinated servo operating system and method based on multi-information fusion
A technology of dexterous hands and human hands, applied in the field of human-computer interaction, can solve problems such as the inability to accurately capture human hand gestures, the limited accuracy of information collection, and the inability to achieve accurate measurement of complex gesture information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
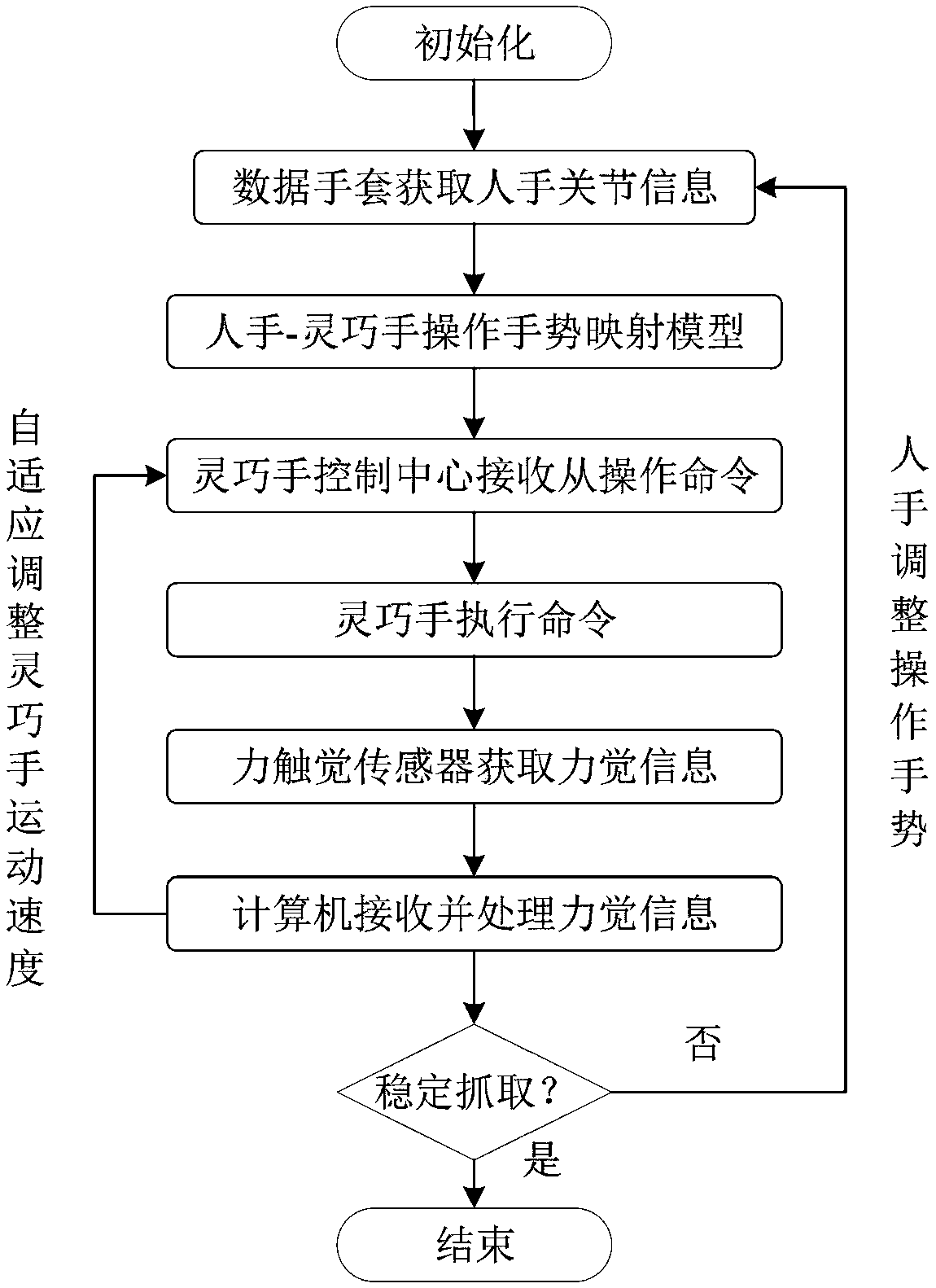
[0060] In this embodiment, a servo operating system based on multi-information fusion for human-hand collaboration with a dexterous hand includes: a flexible and stretchable sensor for a human hand, a flexible and stretchable sensor for a dexterous hand, a flexible force tactile sensor, a wireless transmission module, and a dexterous hand control modules and computer modules;
[0061] The computer module includes: a gesture capturing module, a gesture mapping module and a grasping state recognition module;
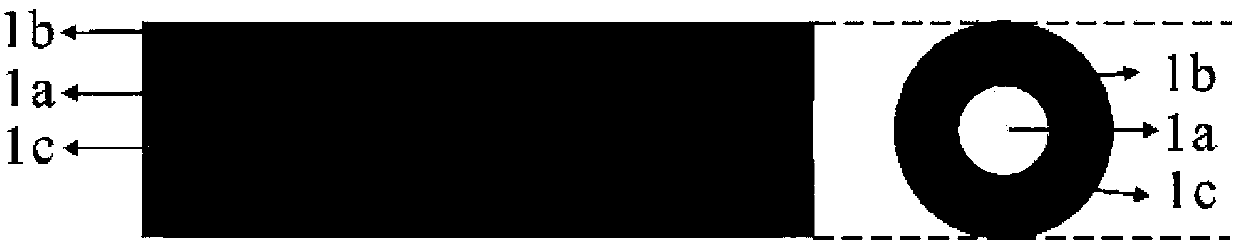
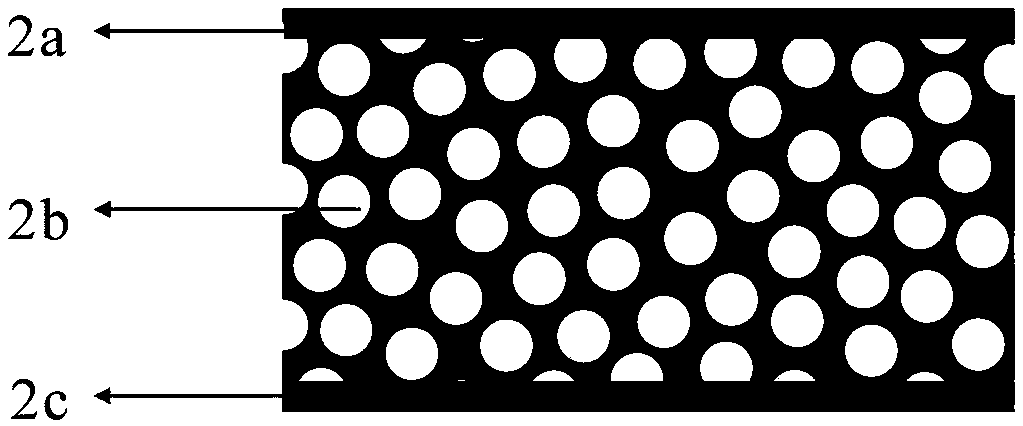
[0062] The human hand flexible and stretchable sensors are arranged at the joints of the flexible gloves and are worn on the human hand, and each finger is provided with two flexible and stretchable sensors, such as Figure 4 As shown in the figure, it is used to collect the angle characteristics of the human hand joints when the human hand operates, and send it to the gesture capture module through the wireless transmission module;
[0063] The gesture capture module per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More