

Autonomous positioning method for unmanned aerial vehicle based on vision and imu
An autonomous positioning and unmanned aerial vehicle technology, applied in mechanical equipment, combustion engines, internal combustion piston engines, etc., can solve problems such as the inability to ensure reliable GPS signal reception and resolution, imu unable to meet autonomous positioning, and limited load and flight capabilities. , to achieve the effect of low cost, high reliability and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
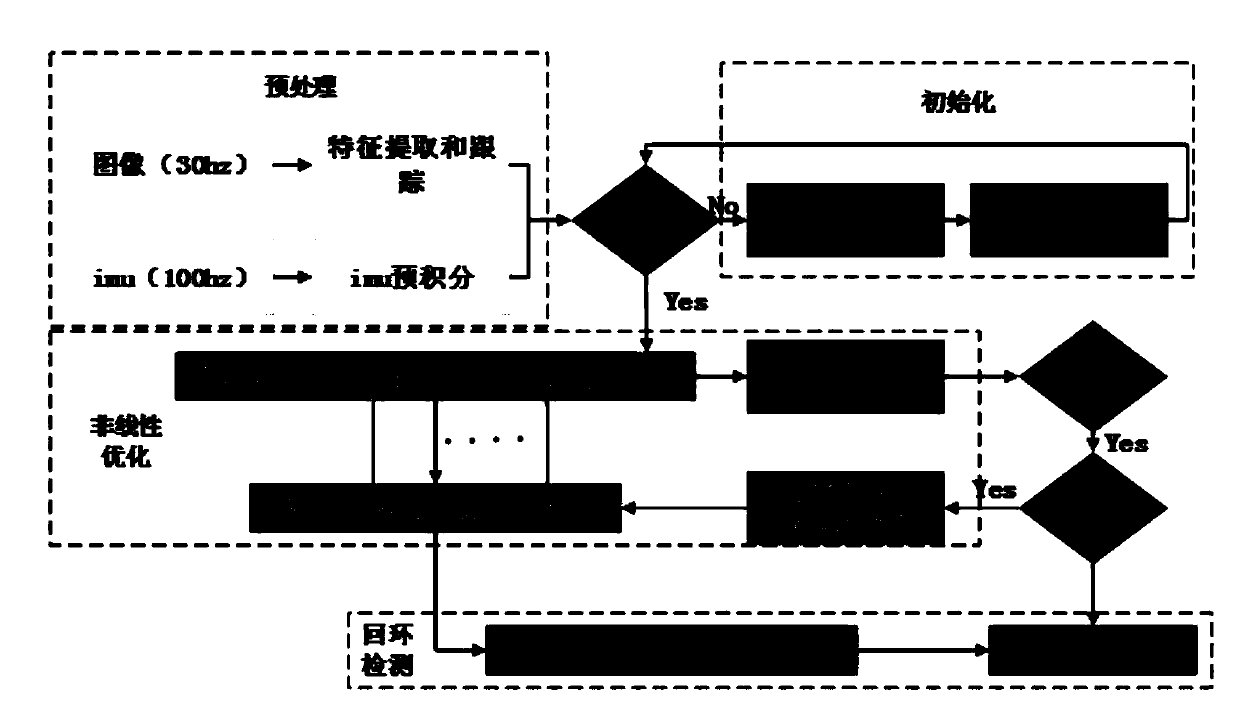
[0037]Aiming at the problems in the prior art, the present invention aims to provide an autonomous positioning method for small and medium-sized UAVs. The UAV is equipped with a camera, an imu sensing device, and a NUC processor. First, the camera on the UAV senses the surrounding environment to obtain image information, and then uses the optical flow method to process the image to achieve motion tracking. Corner points are extracted from the image for initialization of the system. The initialization adopts the epipolar constraint method to match the corner points obtained in the image, and based on this, the position information based on the image is solved. For the acceleration and angular velocity information obtained by the imu sensor, pre-integrate the acceleration information and angular velocity information to solve the position information based on the imu. Next, the position information obtained by the vision and the position information obtained by the imu are regis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More