

Deep underwater intelligent operation robot and control system thereof
A technology of intelligent operation and robotics, applied in the field of robotics, can solve problems such as low operating efficiency, and achieve the effect of simple structure, light weight and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
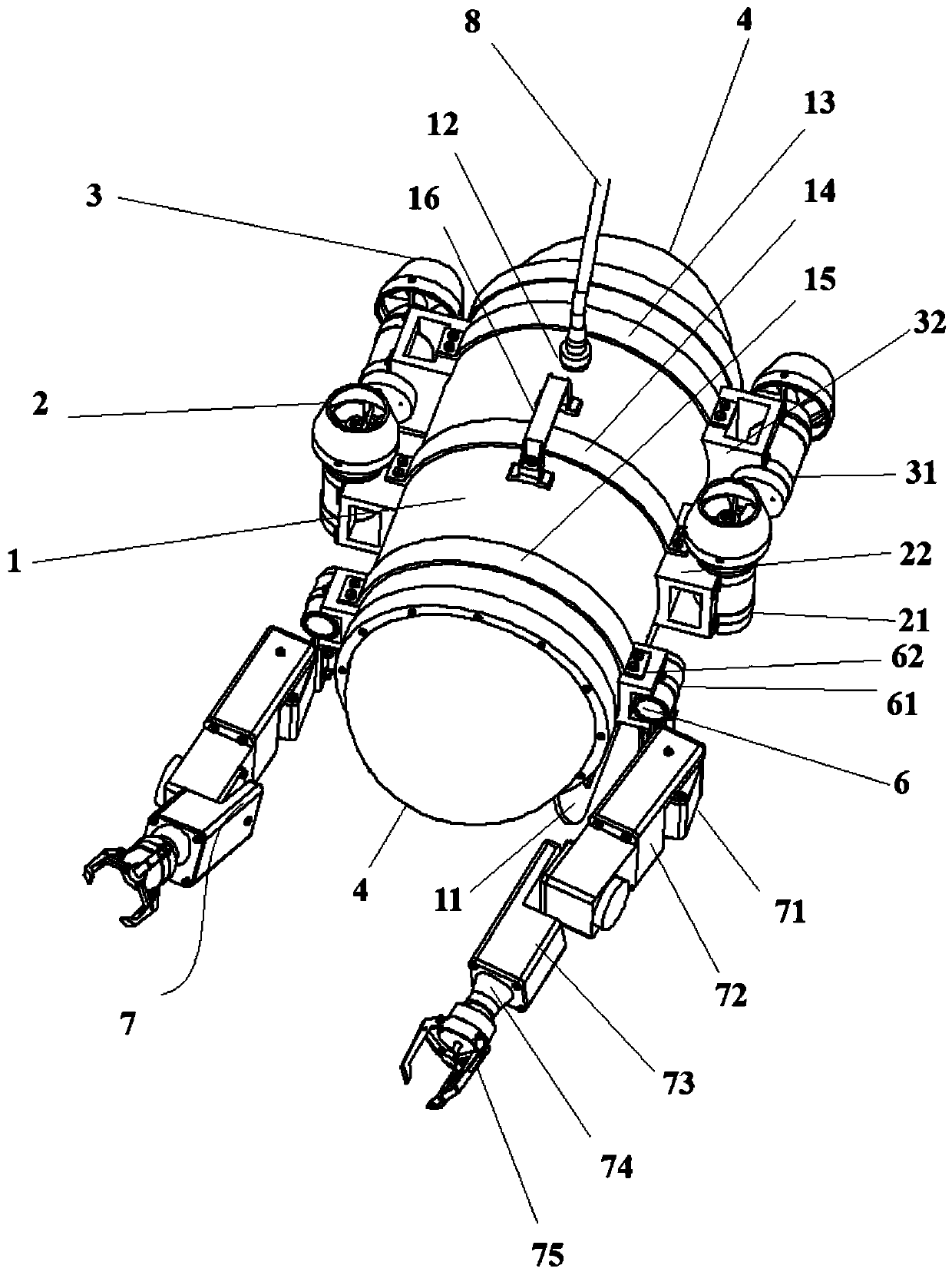
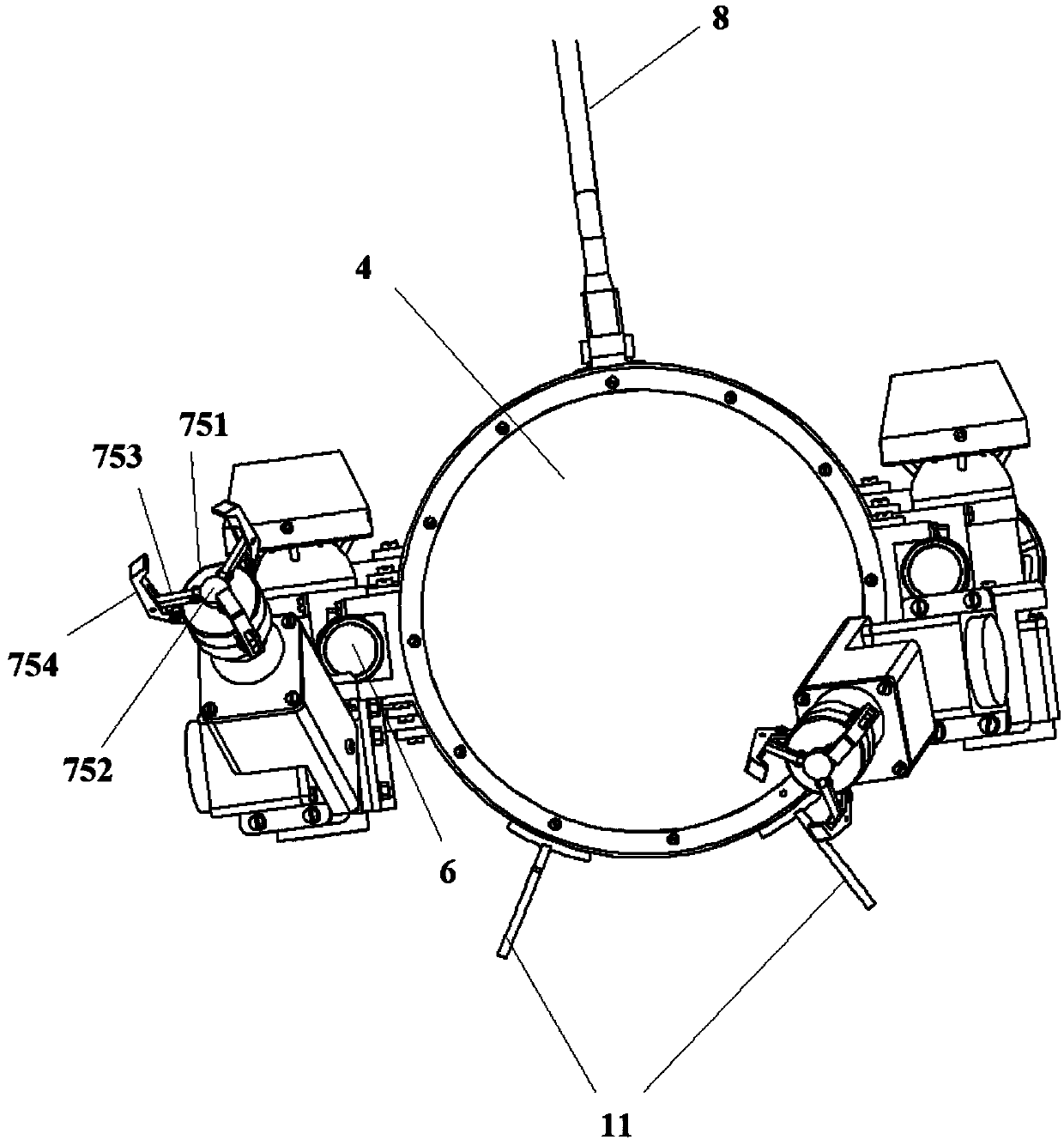
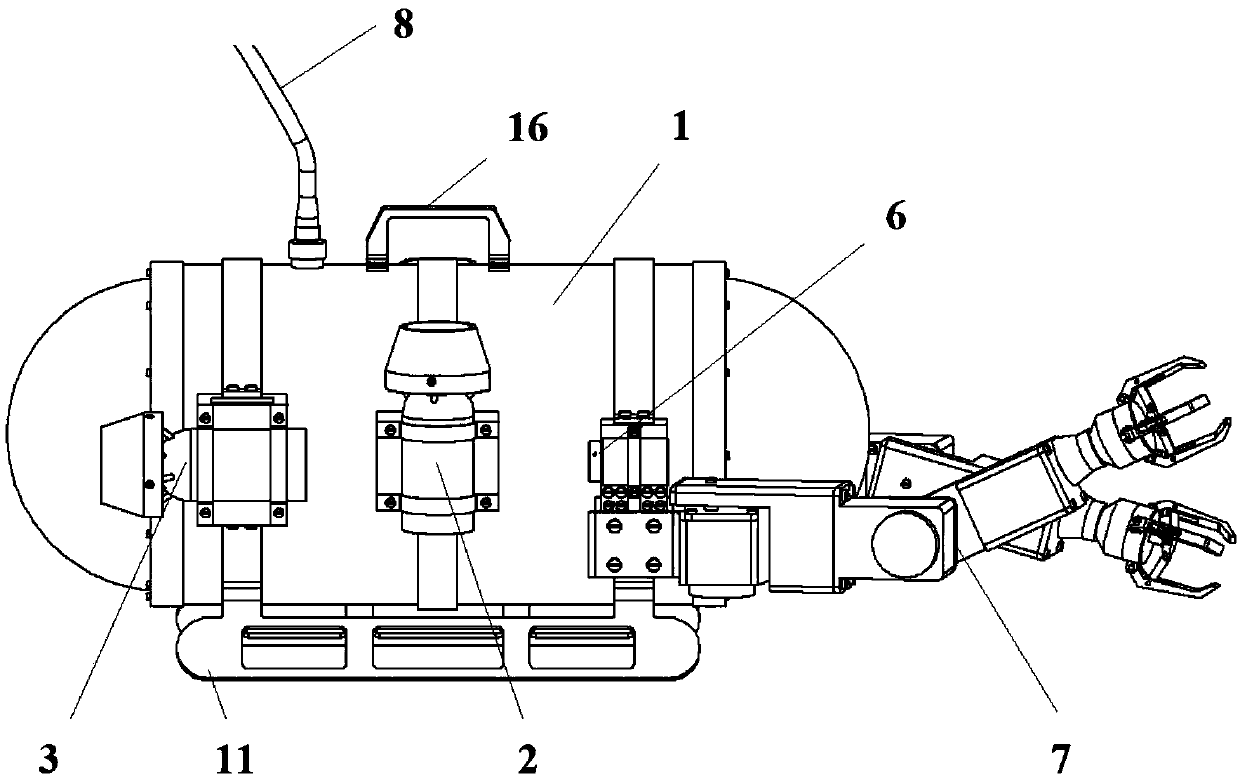
[0056] Such as Figure 1 to 12 As shown, this embodiment provides a deep-water underwater intelligent operation robot, which includes a cylindrical shell 1, a vertical thruster 2 symmetrically installed on both sides of the middle of the outer wall of the shell 1, and symmetrically installed behind the outer wall of the shell 1. The horizontal propellers 3 on both sides of the lower part also include two hemispherical transparent sealing covers 4 installed at both ends of the housing 1, a streamlined sealed pressure chamber 5 surrounded by the housing 1 and the sealing cover 4, and a symmetrical Two illuminating lamps 6 installed on both sides of the front of the outer wall of the housing 1, a six-degree-of-freedom manipulator 7 installed at the lower end of the illuminating lamp 6, two housing brackets 11 installed at the lower end of the housing 1, and the housing 1 The upper cable through hole 12; the sealed pressure cabin 5 is provided with: an arc-shaped battery mounting f...
Embodiment 2
[0068] On the basis of embodiment 1, this embodiment provides a deep-water underwater intelligent operation robot control system, including the deep-water underwater intelligent operation robot of embodiment 1, and also includes a cable 8 sealed and installed on the cable through hole 12 , The ground control box connected to the cable 8 and the video glasses connected to the ground control box; the control signal, power supply and commands of the ground control box are transmitted to the deep-water underwater intelligent operation robot through the cable 8, and the deep-water is received through the cable 8. The video image and sensor data collected by the intelligent operation robot; the ground control box transmits the received video image to the video glasses.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More