

Puncture-assisted guiding device, system and method thereof
A guiding device and guiding system technology, applied in surgical navigation systems, puncture needles, computer-aided surgery, etc., can solve problems such as inability to integrate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
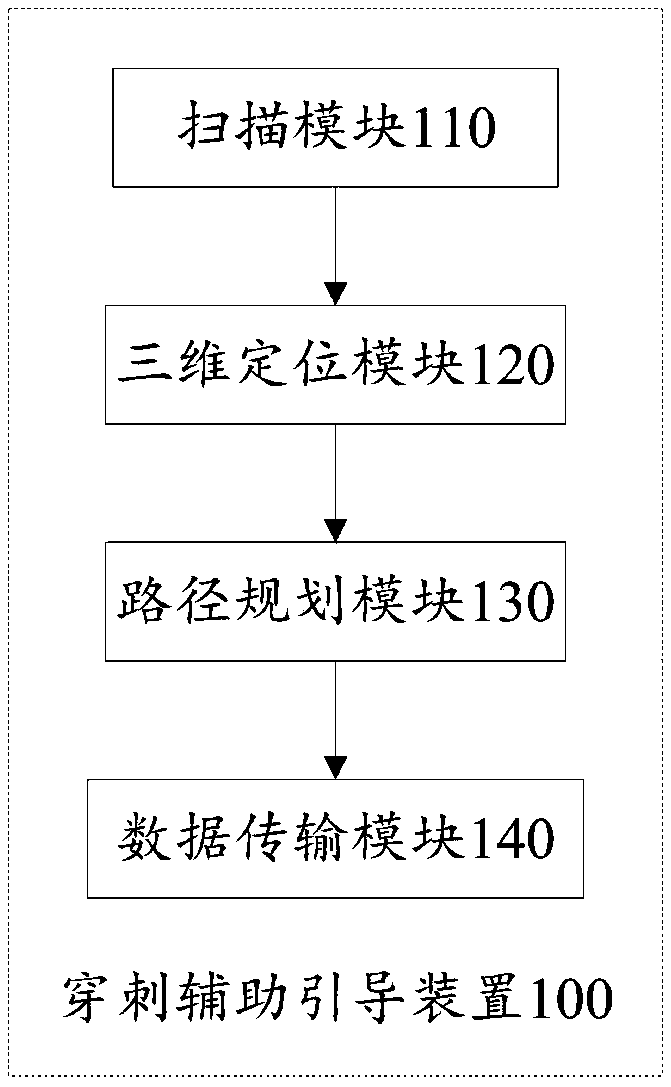
[0072] The invention discloses a puncture auxiliary guide device, the embodiment is as follows figure 1 As shown, it includes: a scanning module 110, which is used to scan the punctured object, and obtain 3D image data of the punctured object and the target body in the body; The 3D image data of the object and its target body, determining the spatial position of the punctured object and its target body; the path planning module 130, configured to at least based on the 3D image data and spatial position of the punctured object and its target body, Determine the positions of the puncture entry point and the puncture arrival point for puncturing the target body of the punctured object, and generate a virtual puncture path according to the position information of the puncture entry point and the puncture arrival point; the data transmission module 140 is used to Sending the spatial position coordinates of the virtual puncture path to the AR device, so that when the object to be pu...
Embodiment 2
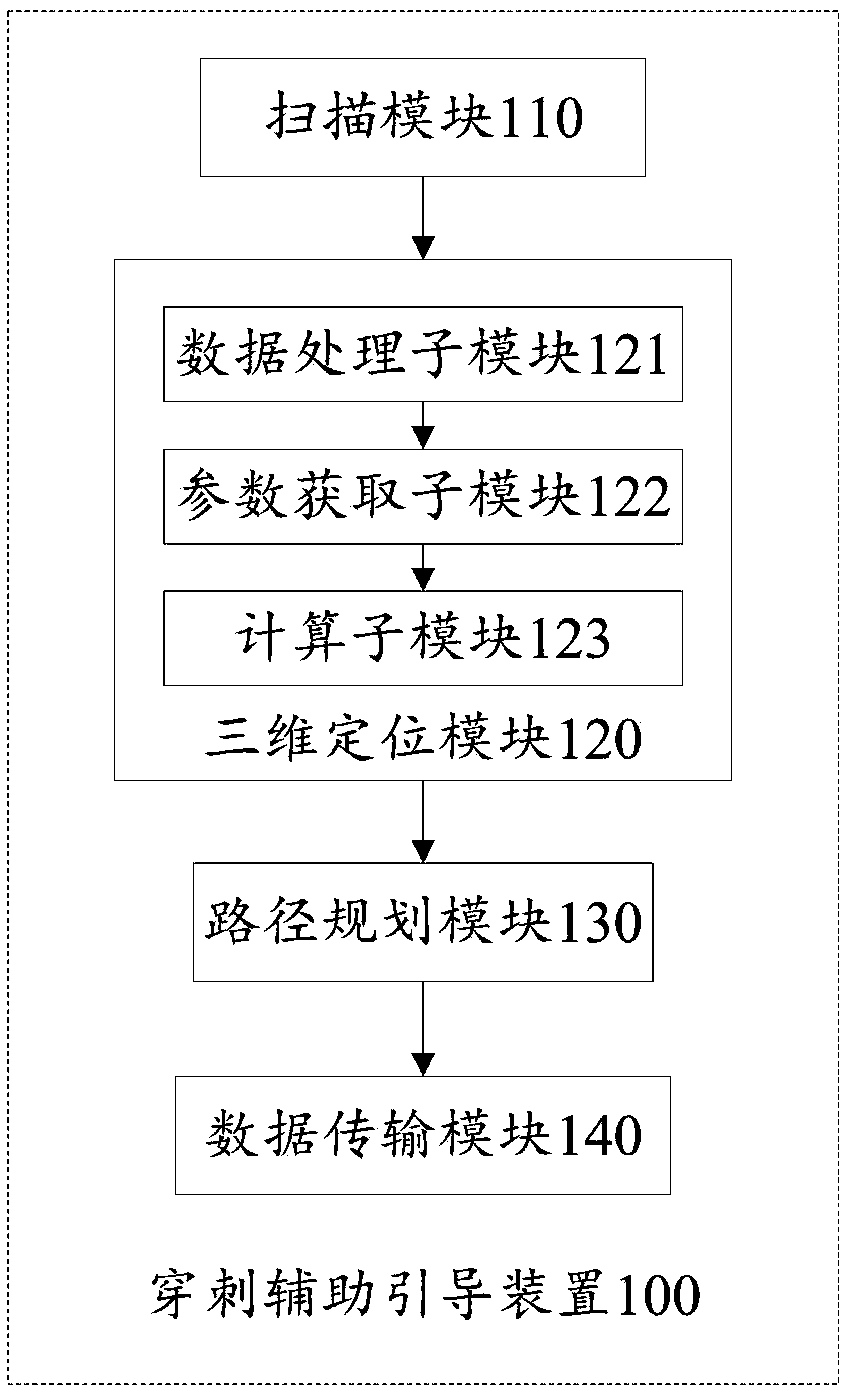
[0083] Another embodiment of the device of the present invention, such as image 3 As shown, on the basis of the above device embodiment, the three-dimensional positioning module 120 includes: a data processing sub-module 121, configured to process the 3D image data of the punctured object and its target body acquired by the scanning module 110, Construct the three-dimensional space of the punctured object and its target body, and determine the initial position coordinates of the punctured object and its target body in the three-dimensional space; the parameter acquisition sub-module 122 is used to obtain the scanned The movement parameter data; the calculation sub-module 123 is used to determine the final position coordinates of the punctured object and its target body according to the initial position coordinates and the movement parameter data.
[0084] In this embodiment, the object to be punctured will be scanned first after being anesthetized on the scanning bed. Since t...
Embodiment 3
[0088] In addition, the invention also discloses a puncture auxiliary guidance system, such as Figure 4 As shown, it includes the puncture auxiliary guide device 100 and the AR device 200 described in any of the above-mentioned embodiments of the present invention; wherein:
[0089] The puncture auxiliary guidance device 100 includes: a scanning module 110 for scanning the punctured object and acquiring 3D image data of the punctured object and the target body in the body; a three-dimensional positioning module 120 for scanning the object according to the scanning module 110 The acquired 3D image data of the punctured object and its target body is used to determine the spatial position of the punctured object and its target body; the path planning module 130 is configured to at least use the 3D image data of the punctured object and its target body and the spatial position, determine the positions of the puncture entry point and the puncture arrival point for puncturing the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More