

Route planning method and device for enabling robots to return to baskets, equipment and medium
A path planning and robot technology, applied in two-dimensional position/channel control, instruments, motor vehicles, etc., can solve problems such as robot damage, interference, and path planning errors, so as to improve the probability of successful recovery and avoid strong light interference Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
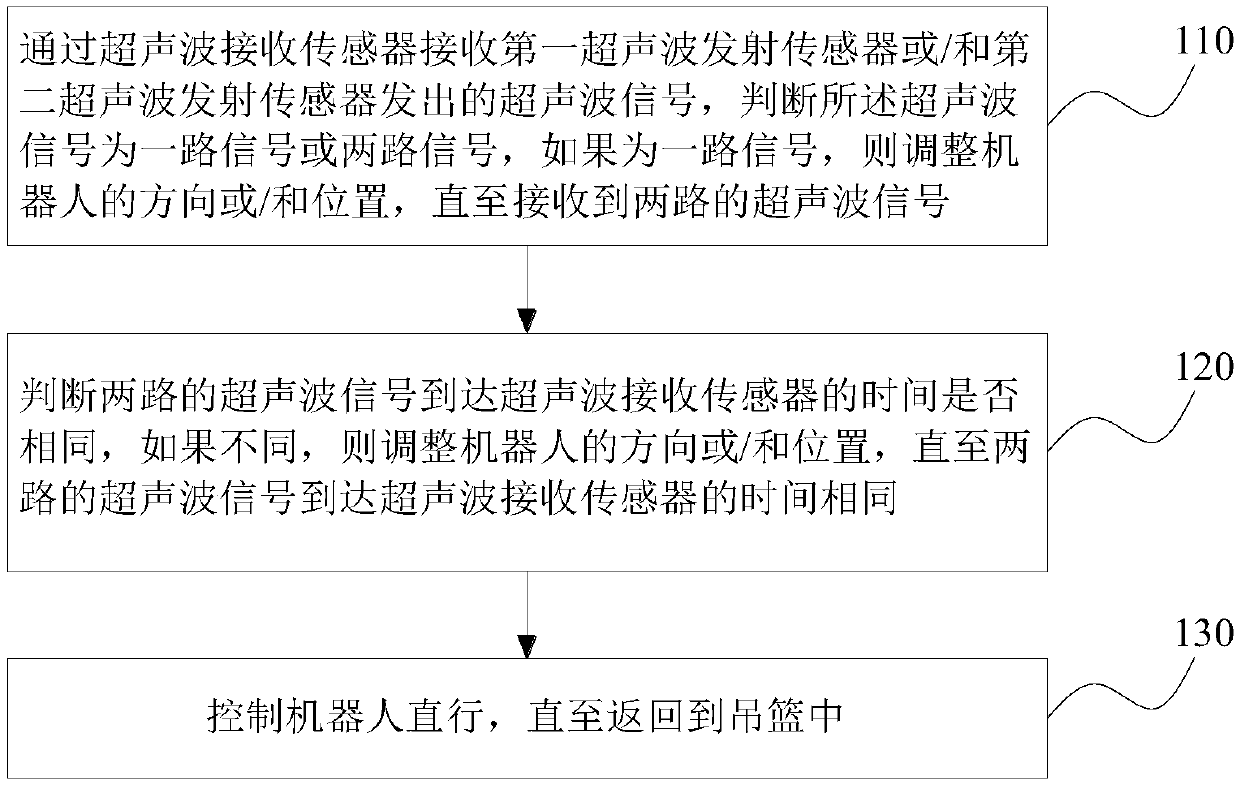
[0039] Embodiment 1 of the present invention discloses a path planning method for a robot returning to a hanging basket, which can be implemented by hardware or / and software, please refer to figure 1 As shown, it includes the following steps:
[0040] 101. Receive the ultrasonic signal sent by the first ultrasonic transmitting sensor or / and the second ultrasonic transmitting sensor through the ultrasonic receiving sensor, judge that the ultrasonic signal is one signal or two signals, if it is one signal, adjust the direction of the robot or / and position until two ultrasonic signals are received.
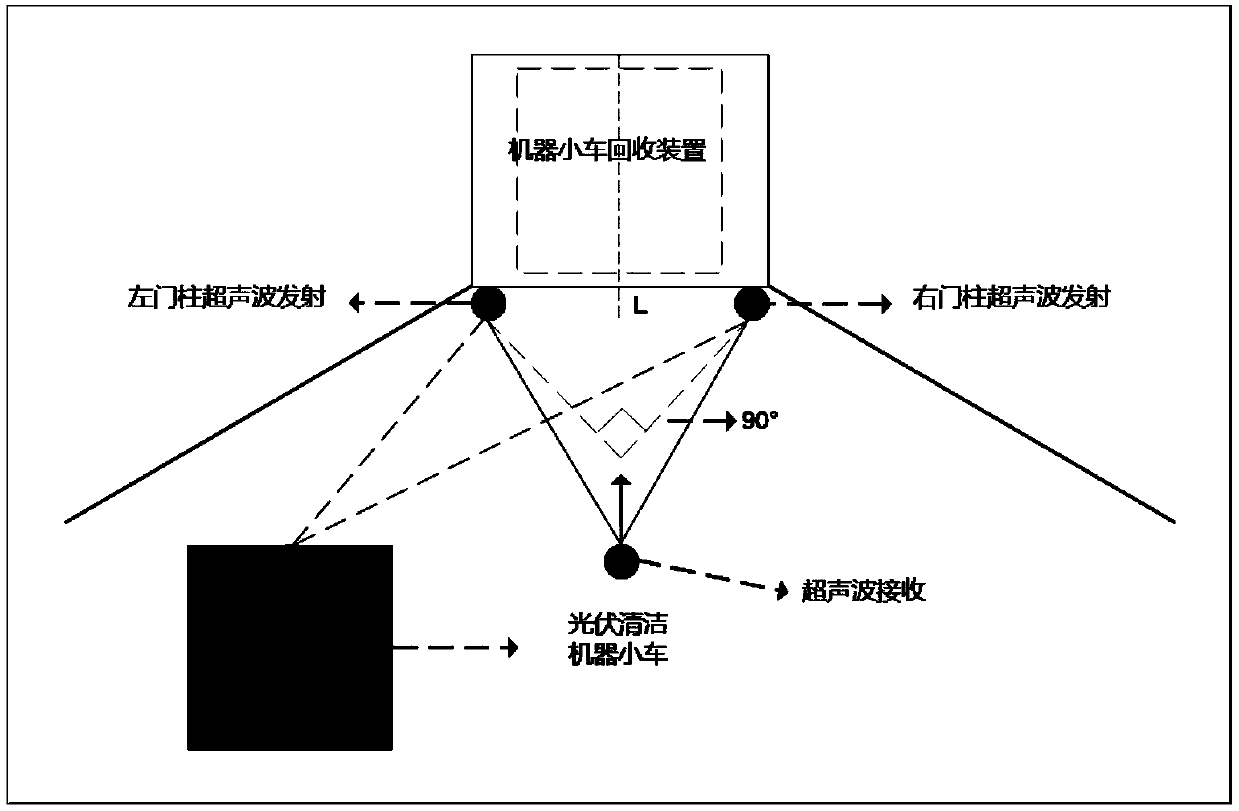
[0041] Such as figure 2 As shown, the ultrasonic receiving sensor is installed in the front middle of the robot, and the first ultrasonic transmitting sensor and the second ultrasonic transmitting sensor take the center line of the hanging basket door as the axis of symmetry, and are symmetrically installed on both sides of the center line of the hanging basket door. In a preferr...
Embodiment 2
[0055] Embodiment 2 discloses a path planning device for the robot to return to the hanging basket corresponding to the above-mentioned embodiment. An ultrasonic receiving sensor is installed in the middle of the front side of the robot, and a first ultrasonic transmitting sensor and a first ultrasonic transmitting sensor are installed on the hanging basket. The second ultrasonic transmitting sensor, the first ultrasonic transmitting sensor and the second ultrasonic transmitting sensor take the hanging basket door as the central axis, and are symmetrically distributed on both sides of the hanging basket door, please refer to Figure 4 shown, which includes:
[0056] The first judging module 210 is used to receive the ultrasonic signal sent by the first ultrasonic transmitting sensor or / and the second ultrasonic transmitting sensor through the ultrasonic receiving sensor, and judge that the ultrasonic signal is one signal or two signals, if it is one signal, then Adjust the dir...
Embodiment 3
[0060] Figure 5 A schematic structural diagram of an electronic device provided in Embodiment 3 of the present invention, such as Figure 5 As shown, the electronic device is the hardware composition of the monitoring platform, which includes a processor 310, a memory 320, an input device 330 and an output device 340; the number of processors 310 in the computer device can be one or more, Figure 5 Take a processor 310 as an example; the processor 310, memory 320, input device 330 and output device 340 in the electronic device can be connected by bus or other methods, Figure 5 Take connection via bus as an example.
[0061] The memory 320, as a computer-readable storage medium, can be used to store software programs, computer-executable programs and modules, such as the program instructions / modules corresponding to the path planning method for the robot to return to the hanging basket in the embodiment of the present invention (for example, The first judging module 210, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More