

A parallel three-dimensional point cloud data automatic registration method
A 3D point cloud and data technology, applied in image data processing, instruments, calculations, etc., can solve the problems of affecting the registration effect, huge time cost, and high accuracy requirements of artificial standards, so as to reduce computational complexity and improve accuracy , to avoid the effect of misregistration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention provides a parallel automatic registration method for 3D point cloud data, such as Figure 4 shown, including the following steps:
[0037] Step 1: Obtain the source point cloud P and target point cloud Q to be registered under different views;
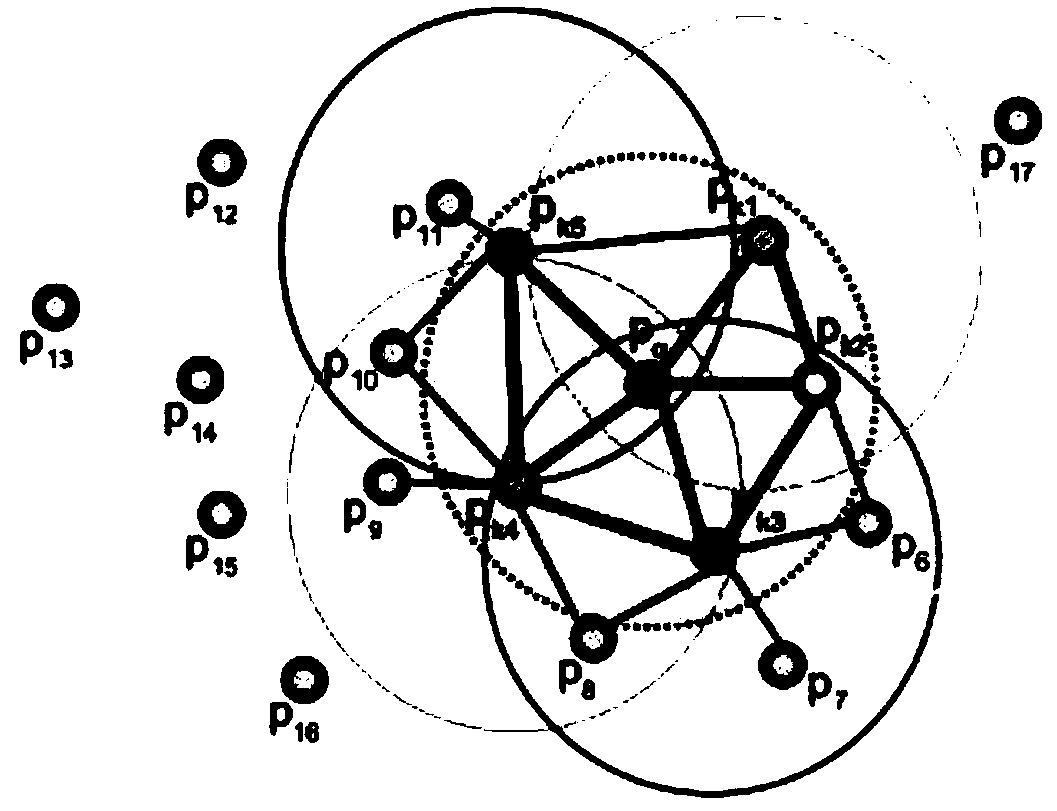
[0038] Step 2: Point cloud downsampling processing. The downsampling process is performed on large-scale 3D point cloud data to reduce the amount of calculation while retaining the characteristics of the point cloud data to the greatest extent. Here, the scale-invariant feature transformation 3D-SIFT is used to extract the key points in the point cloud as the result of downsampling. In particular, for the field of 3D reconstruction, the sparse point cloud can be directly used as the downsampling result. The number of key points N in the source point cloud P after downsampling p , the number of key points M in the target point cloud Q q .
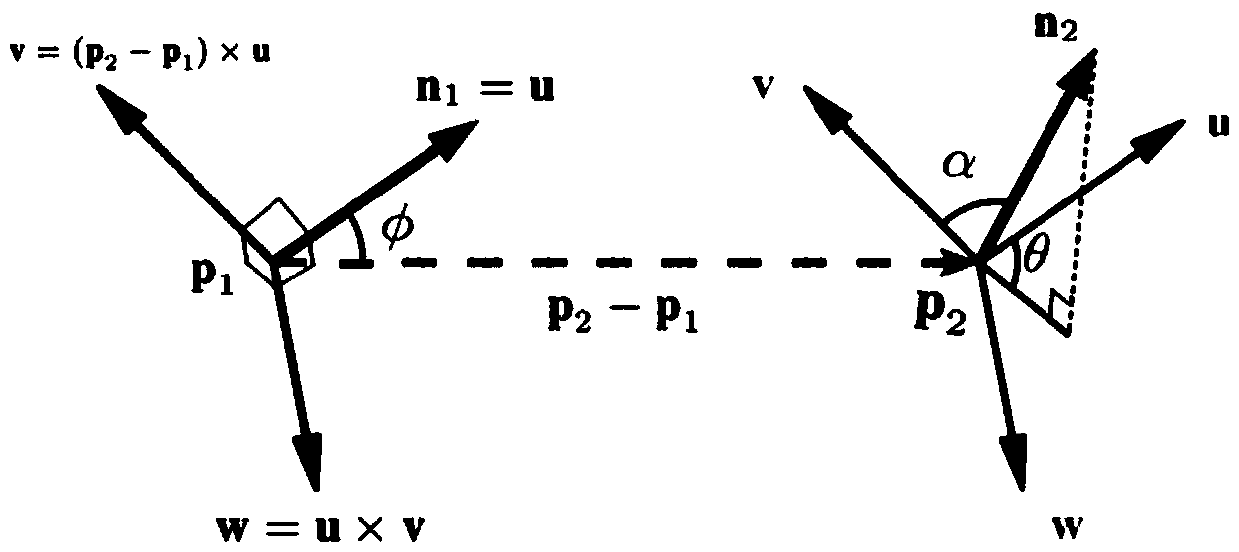
[0039] Step 3: Calculate the normal vector for the points in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More