

Adaptive Monte-Carnot positioning method incorporating two-dimensional code information
A technology of two-dimensional code information and positioning method, applied in the field of Monte Carlo positioning, can solve the problems of unsatisfactory accuracy, complex design of artificial road signs, and low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0041] The technical scheme that the present invention solves the problems of the technologies described above is:
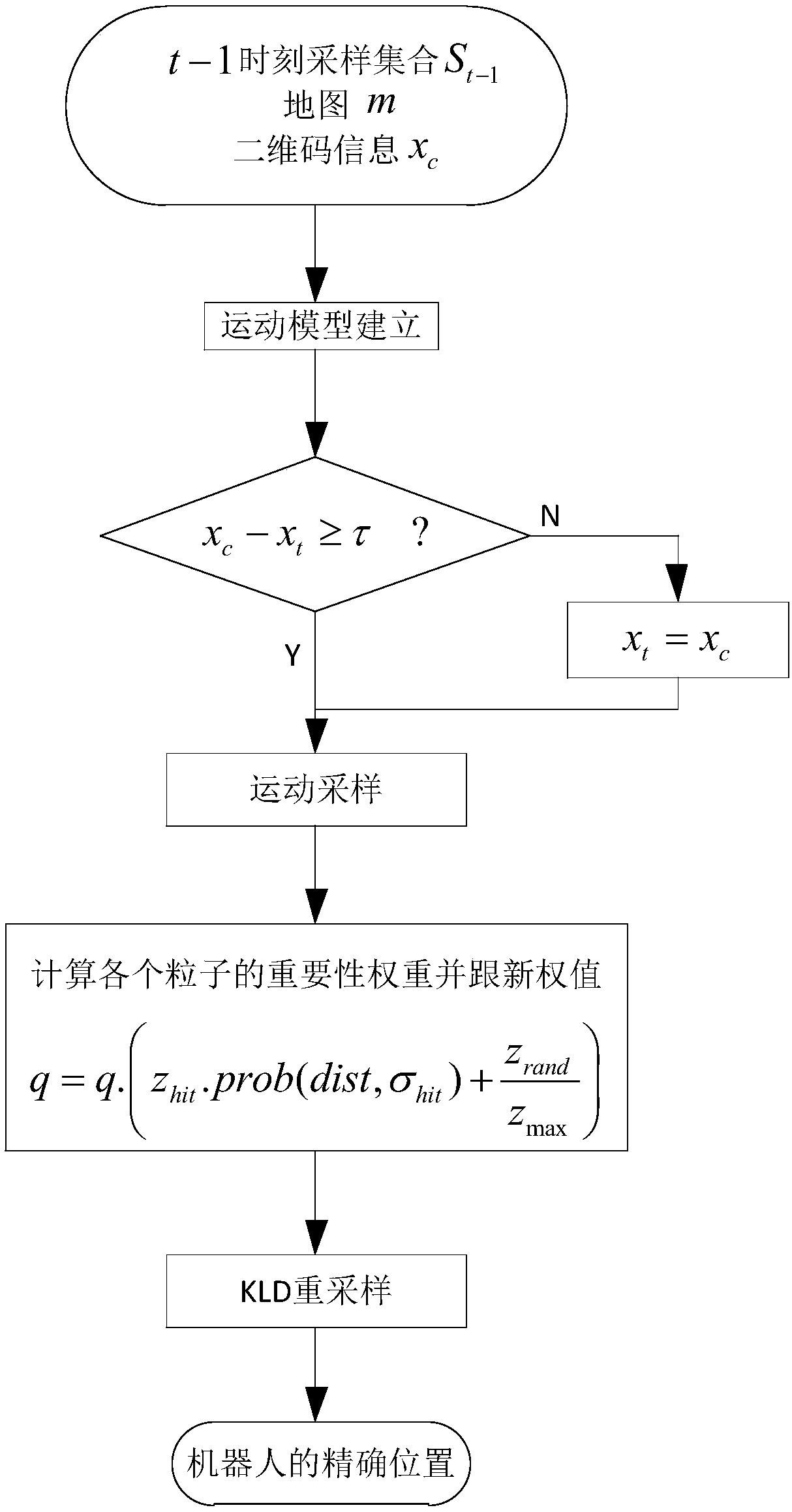
[0042] Such as figure 1 As shown, the present invention provides a kind of self-adaptive Monte Cano positioning method that incorporates two-dimensional code information, and it comprises the following steps:
[0043] S1, the sampling set at time χ t-1 , each particle corresponds to the estimated trajectory of the robot at this point, and the control amount u applied at time t-1 t and the global coordinate information x provided by the QR code c As input, the absolute position information provided by the QR code can correct the odometer motion model;
[0044] In the time interval (t-1,t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More