

ESO-based magnetic suspension ball sliding mode variable structure control method
A sliding mode variable structure and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inability to enhance robustness and anti-interference performance, and inability to obtain the speed state of the ball
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] In order to make the technical scheme and design idea of the present invention clearer, a detailed description will be given below in conjunction with the accompanying drawings. It should be understood that the specific implementation cases described here are only used to explain the present invention, and are not intended to limit the present invention.
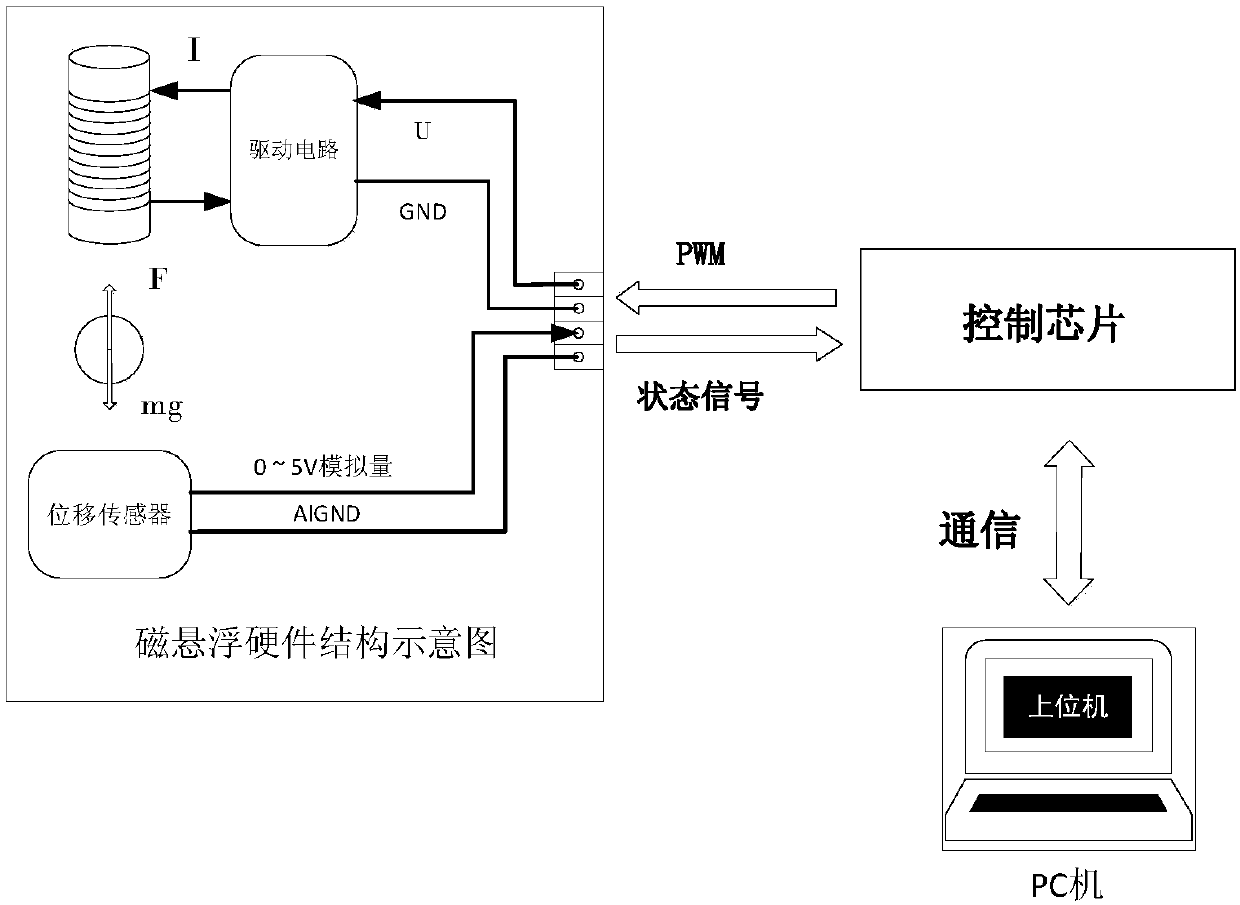
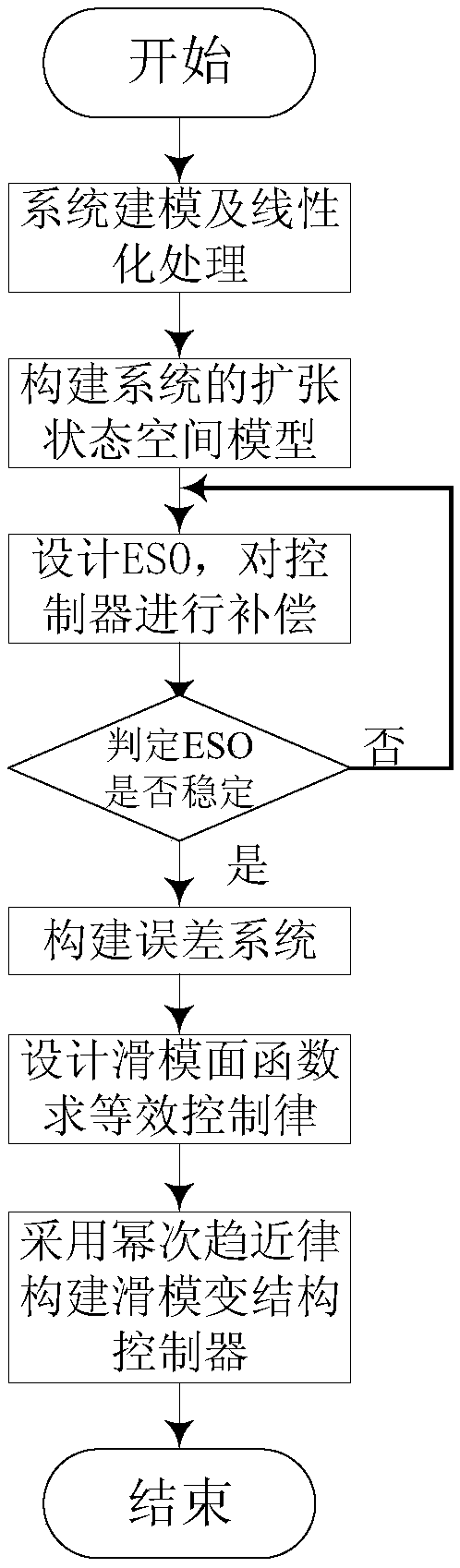
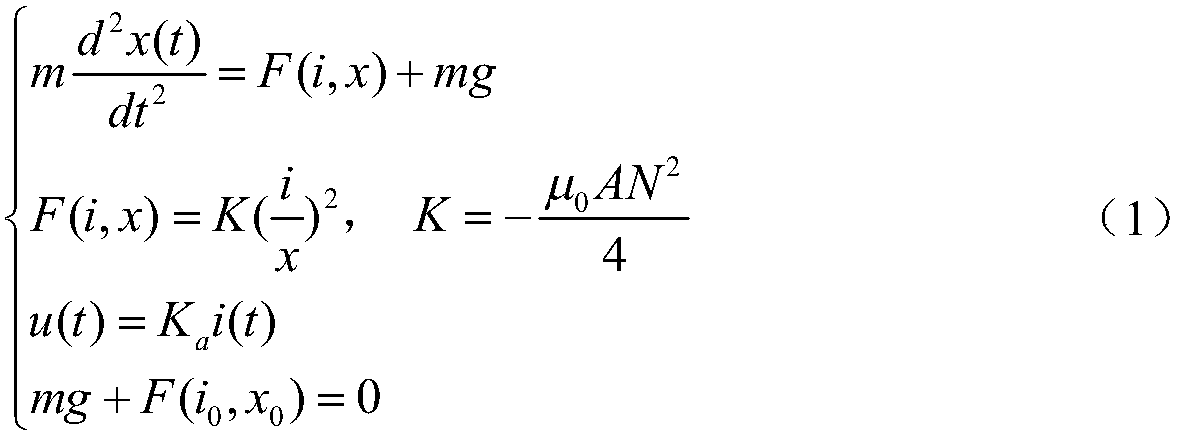
[0080] refer to figure 1 and figure 2 , an ESO-based sliding mode variable structure control method for magnetically levitated balls, such as figure 1 As shown, the maglev ball control system obtains the position status information of the ball through the displacement sensor. The mathematical model of the system can be described as
[0081]
[0082] Among them, m is the mass of the ball, d is the diameter of the ball, x, i are the position of the ball and the current in the electromagnetic coil, x 0 ,i 0 are respectively the equilibrium position of the ball and the current of the electromagnetic coil at the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More