

A multi-degree-of-freedom open-loop stepping series manipulator and its control method
A robotic arm, degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of too many signal cables, inability to find change, large volume and weight, and achieve low cost, avoid position confusion, reduce cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
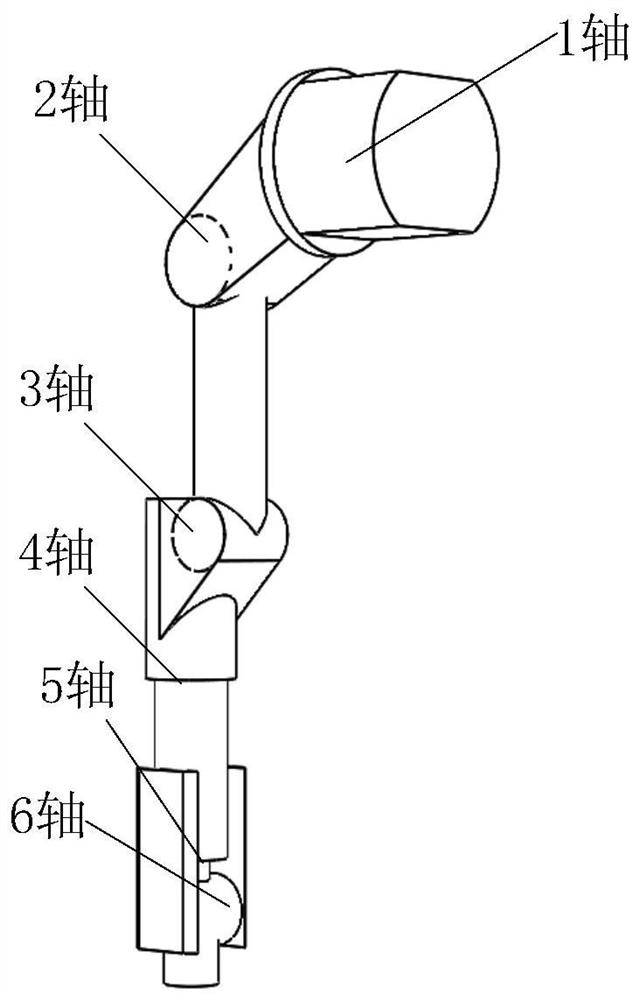
[0061] A stepping open-loop series manipulator product - the right arm of a humanoid robot (such as image 3 ) as an example, the robotic arm has 6 joints, namely front and rear shoulder joints (1 axis), left and right shoulder joints (2 axes), elbow joints (3 axes), wrist joint 1 (4 axes), wrist joint 2 (5 axes) axis), wrist joint 3 (6 axes), the standard zero position of the robot arm is the pose of the robot arm commonly used in the industry, and the angles of each axis are (0°, 90°, 0°, 0°, 90°, 0°). The reducer of each axis of the manipulator is a synchronous belt, each axis does not have a brake, and the manipulator can droop naturally when the power is off; each joint of the manipulator is equipped with a change device, and a belt is installed in the movement space of the manipulator. A camera for depth information, and a cross target installed at the end of the robotic arm.
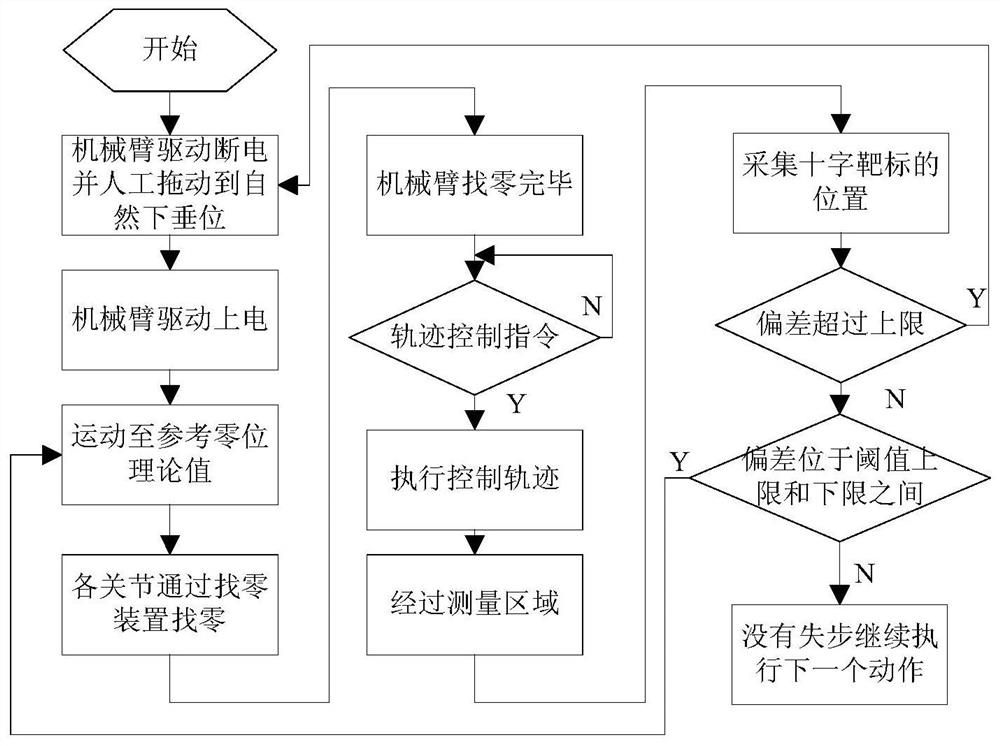
[0062] The control method is as follows:
[0063] Before the mechanical arm drive is powered...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More