

A hybrid brain-computer interface driven rehabilitation assistance robot
A brain-computer interface and robotics technology, applied in the field of robotics, can solve the problems of not giving full play to the advantages of brain-computer interface and robotics technology, lack of feedback mechanisms, etc., to improve autonomous living ability, high recognition accuracy, and good human-computer interaction. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings, but the embodiments of the present invention are not limited thereto.
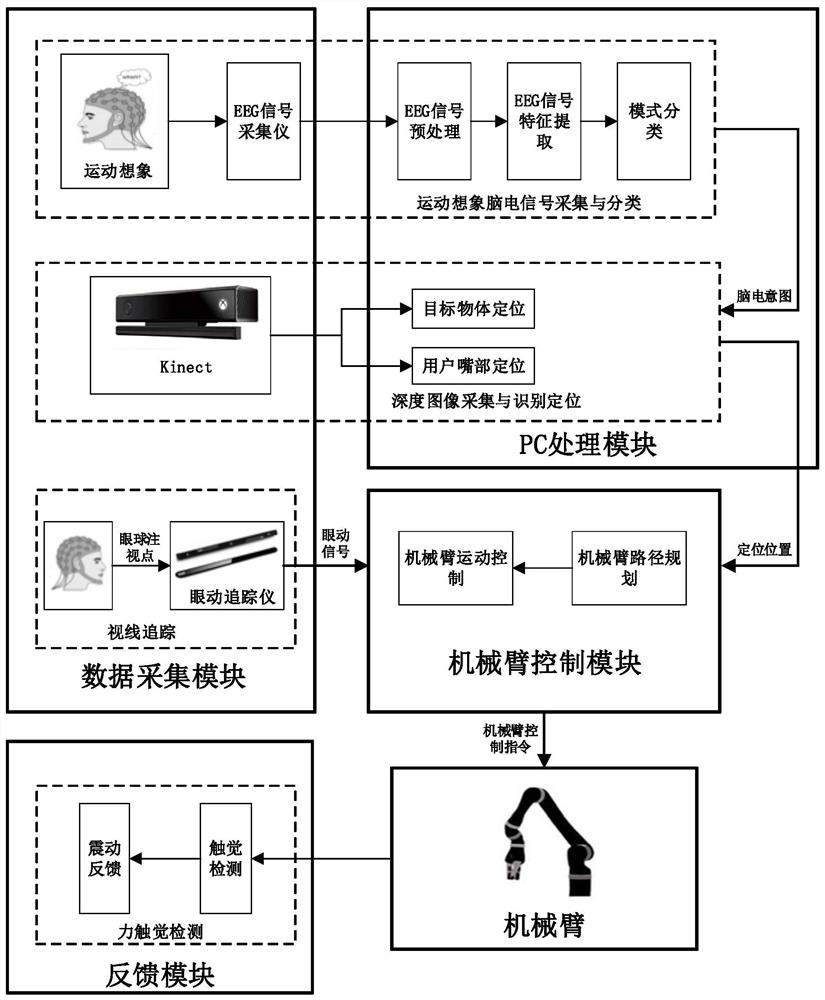
[0039] Such as figure 1 As shown, the present invention is a rehabilitation assistant robot driven by a hybrid brain-computer interface, including: a data acquisition module, a manipulator control module, a manipulator, a feedback module and a PC processing module. The data acquisition module is used to collect the user's sight movement information and motor imagery EEG signals generated during motor imagery, and collect the depth image information of the user's face and target objects (such as food) according to the instructions of the PC processing module; the PC processing module It is used to analyze the user's EEG intention according to the user's motor imagery EEG signal to obtain the target object that the user wants to grab, send instructions to the data acquisition...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More