Mobile robot positioning method
A mobile robot and positioning method technology, applied in the field of robotics, can solve problems such as poor robustness, and achieve the effects of low cost, enhanced robustness, low power consumption and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
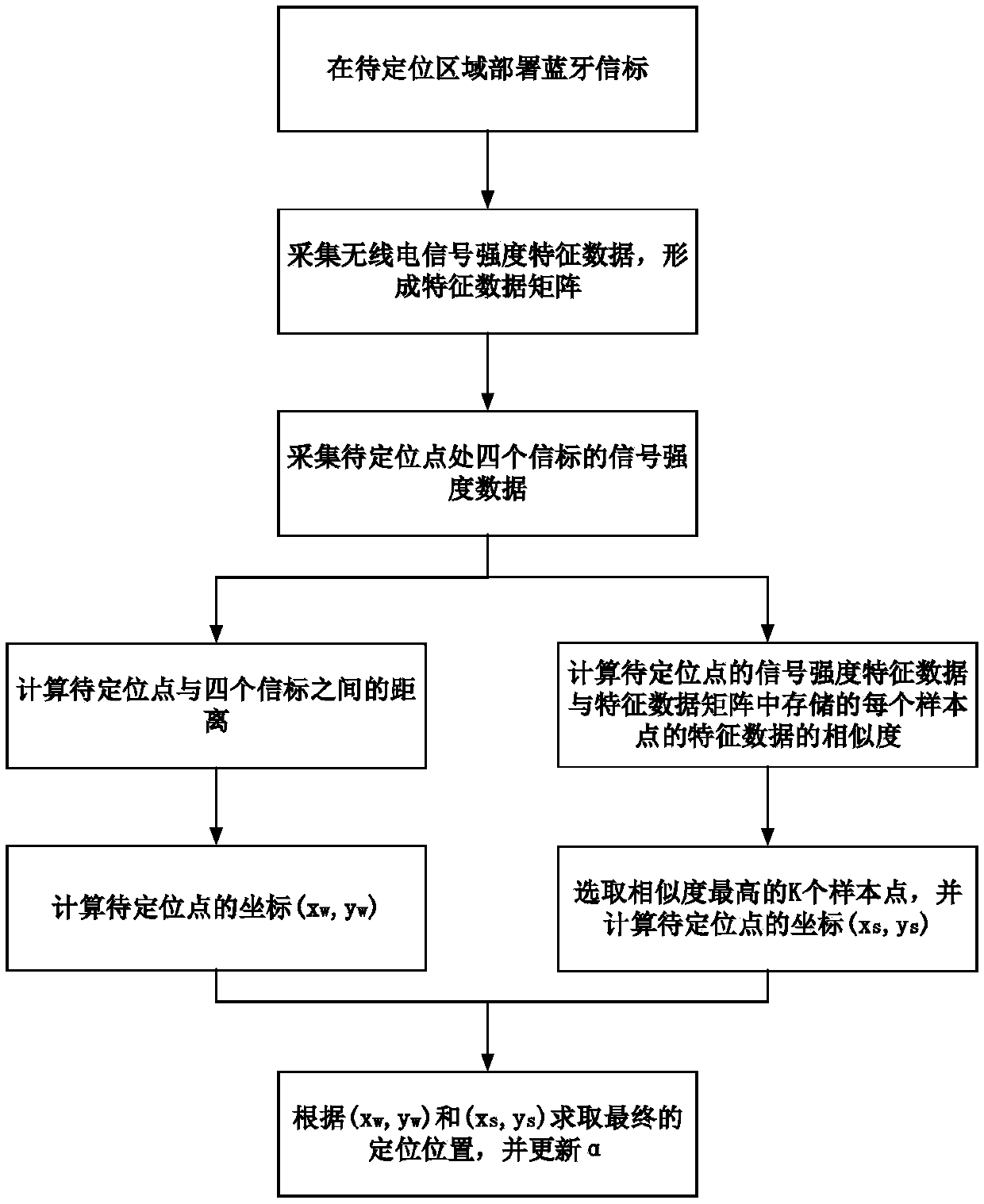
[0036] A mobile robot positioning method, such as figure 1 As shown, it specifically includes the following steps:
[0037] Step S1: First, deploy 4 Bluetooth beacons in the indoor area to be located, respectively located at the four vertices, denoted as B 1 ,B 2 ,B 3 ,B 4 , the positions of these four beacons are known, denoted as
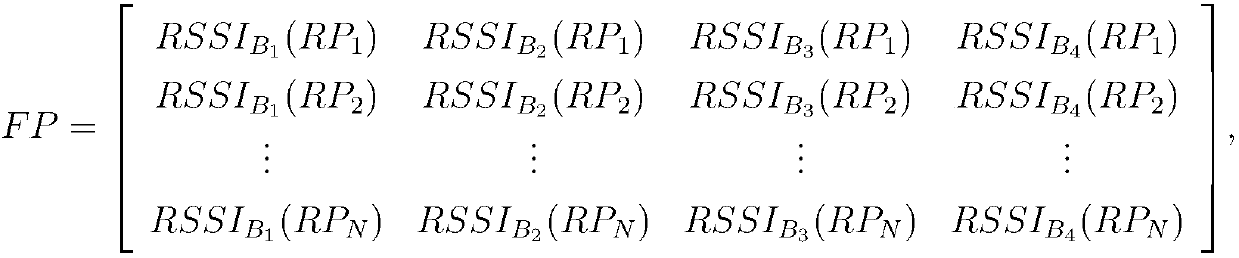
[0038] Step S2: The signal radiated by the beacon deployed in step S1 will form a radio wave signal field indoors. At different fingerprint sample points in the indoor area to be located, denoted as RP, collect radio signal strength characteristic data to form a characteristic data matrix
[0039]
[0040] in, Indicates Beacon B i At sample point RP j The radio signal strength at , N is the number o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com