

Rehabilitation glove for external skeleton
An exoskeleton and glove technology, applied in artificial arms, passive exercise equipment, physical therapy, etc., can solve problems such as difficult processing, uncomfortable wearing of metal materials, and unsatisfactory effects, so as to achieve precise control and help hand function recovery , Efficient hand function rehabilitation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Below, the present invention will be described in further detail in conjunction with the accompanying drawings.
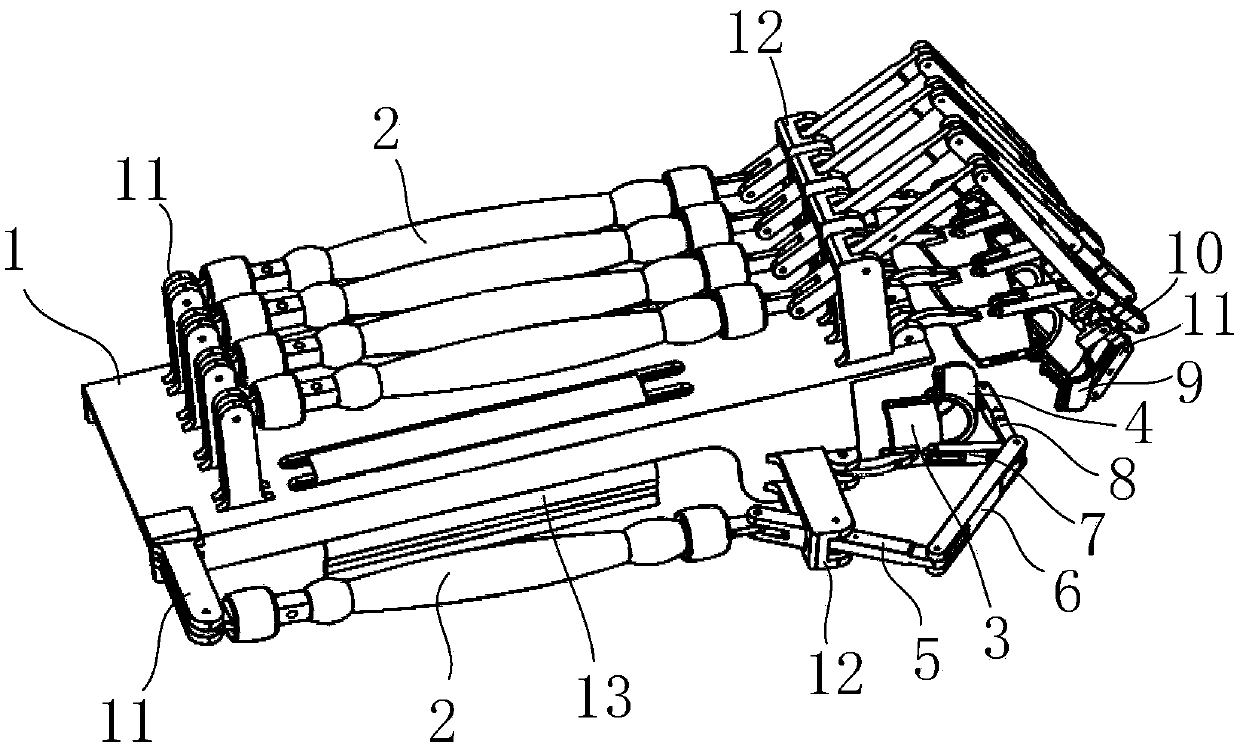
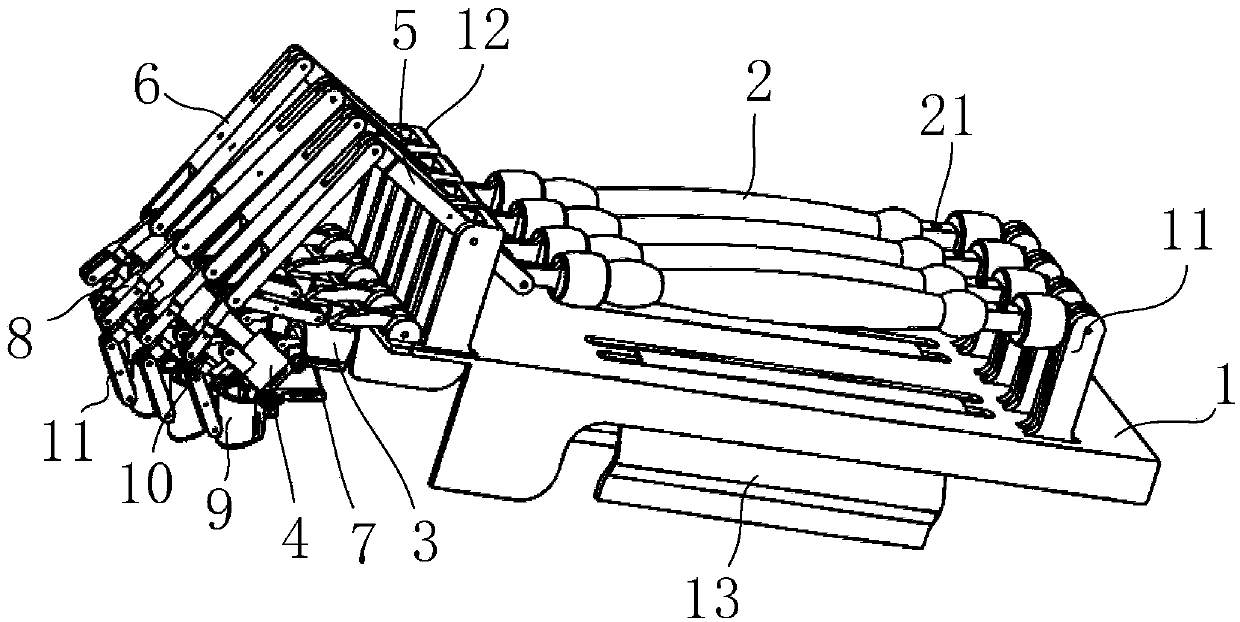
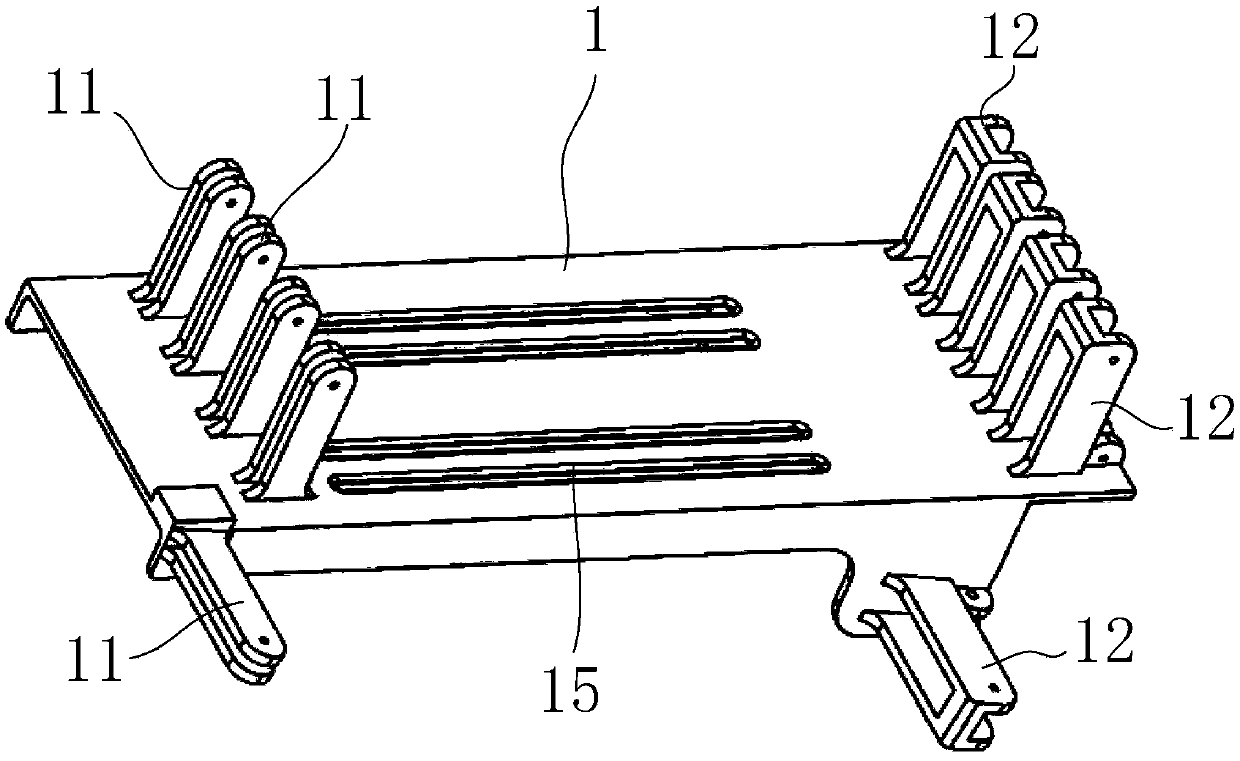
[0018] Such as Figure 1-4 As shown, this embodiment discloses an exoskeleton rehabilitation glove, including a glove body and a drive control system. The glove body includes a hand support plate 1 and five finger assemblies corresponding to five fingers of a person, namely a thumb assembly, an index finger assembly, a middle finger assembly, a ring finger assembly and a little finger assembly. The five finger assemblies are all installed on the hand support board 1, wherein the thumb assembly is installed on the side surface of the hand support board 1, and the index finger assembly, middle finger assembly, ring finger assembly and little finger assembly are all installed side by side on the hand support board 1 of the upper surface.
[0019] Each of the five finger assemblies has a pneumatic tendon 2 and a mobile bone cuff assembly. The mobile sleeve as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More