

Posture evaluation method based on dynamic step length gradient descent
A dynamic step size, gradient descent technique, applied in the field of signal processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
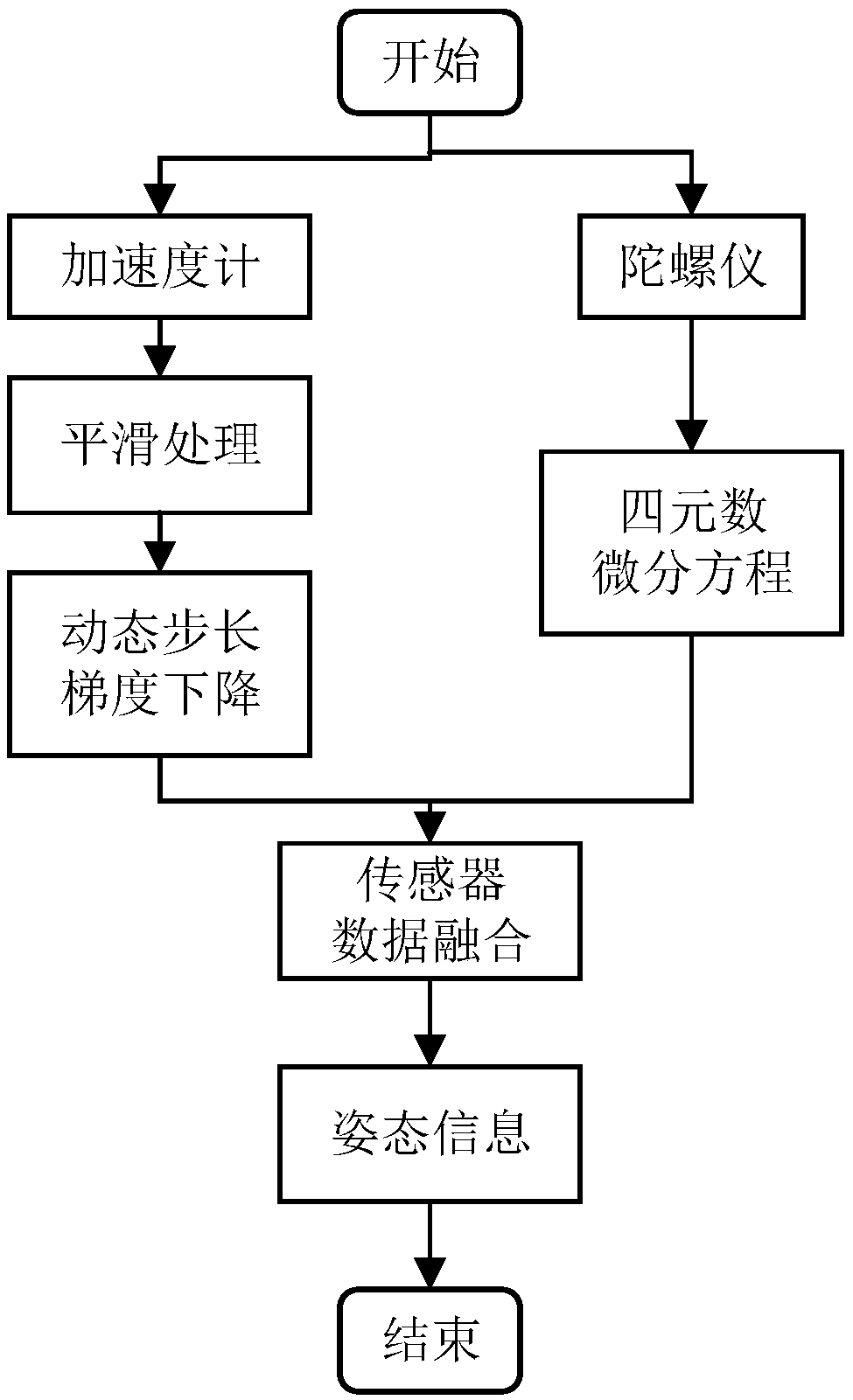
[0062] Such as Figure 1-3 As shown, the embodiment of the present invention provides an attitude estimation method based on dynamic step size gradient descent, including:
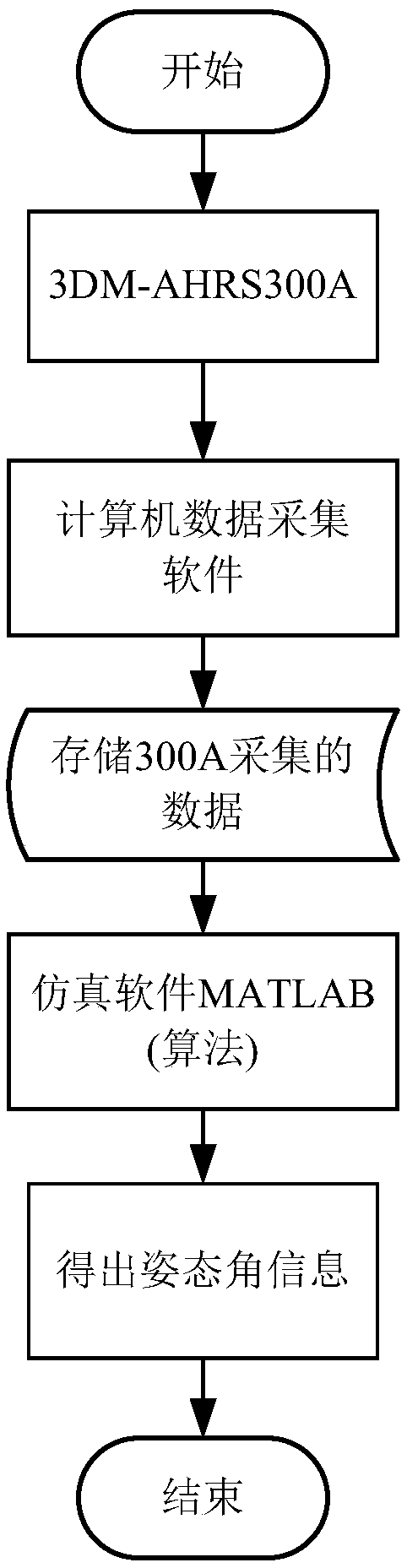
[0063] Step A: The inertial navigation device IMU has a three-axis accelerometer and a three-axis gyroscope, and collects the accelerometer and gyroscope data output by the IMU (wherein, the accelerometer outputs the acceleration data of the three axes; the gyroscope outputs the angular velocity data of the three axes) ;
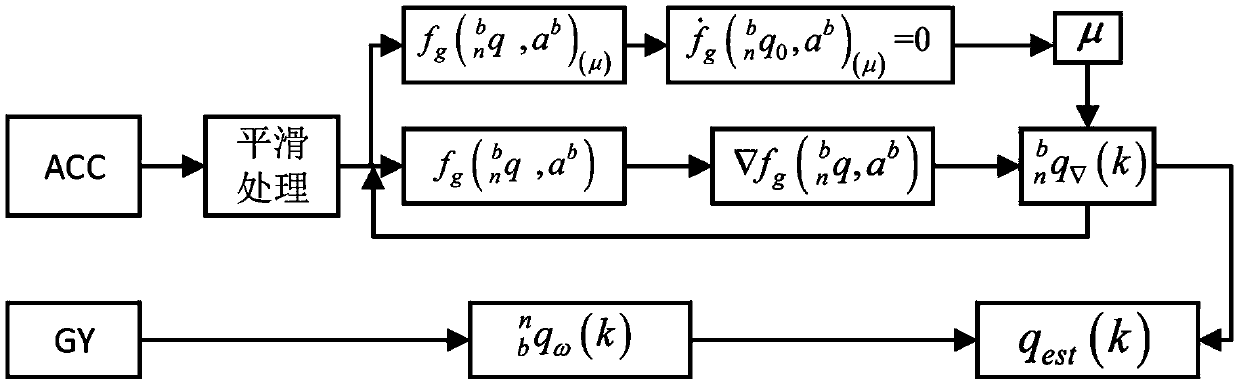
[0064] Step B1: In order to correct the motion noise of the moving carrier, smooth the accelerometer data information from the IMU; then obtain a set of quaternions through the dynamic step gradient descent algorithm;
[0065] Step B2: through the differential equation of the quaternion, the output data of the gyroscope is solved to obtain another group of quaternions;
[0066] Step C: Data fusion of the two sets of data obtained in Step B1 and Step B2 to obtain the required attitude i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More