

Manipulator smart car system based on WiFi control and control method
A control method and technology for smart cars, applied in the field of robots, can solve the problems of poor control performance, inability to realize forward, backward, left turn, right turn, waiting and other movements of the smart car, and achieve simple and easy design, improve design efficiency and Design level effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
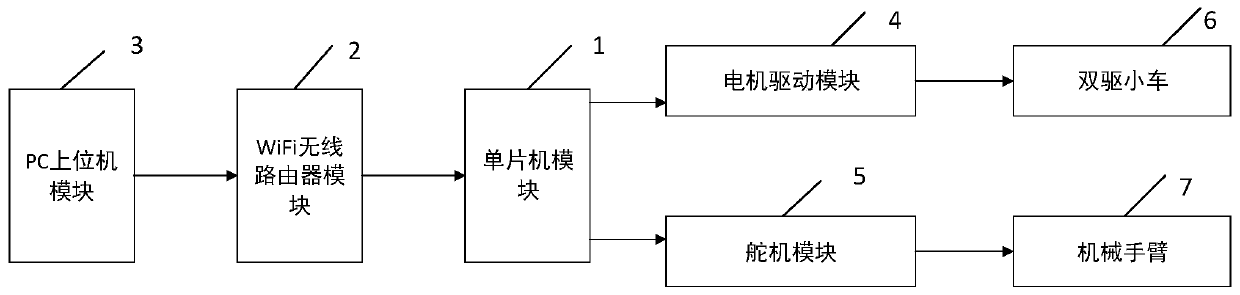
[0057] In the existing technology, it is impossible to realize the forward, backward, left turn, right turn, waiting and other movements of the smart car, and to coordinate and control the mechanical arm to lift, land, grip, release, forward and reverse during the movement of the car. and so on. The control performance of the different states of the car and the mechanical arm is poor.
[0058] In order to solve the problems existing in the prior art, the application principle of the present invention will be described in detail below in combination with the technical solution.
[0059] Such as figure 1 As shown, the mani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More