

Method for relative distance control and adaptive correction between multiple agents
A relative distance, multi-agent technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of high real-time information processing capability, cannot fully guarantee followers, complex communication protocols, etc. Real-time information processing capability, improving timeliness, and the effect of strong self-anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention applies to a relative distance control and self-adaptive correction method between multiple agents, specifically comprising the following steps:
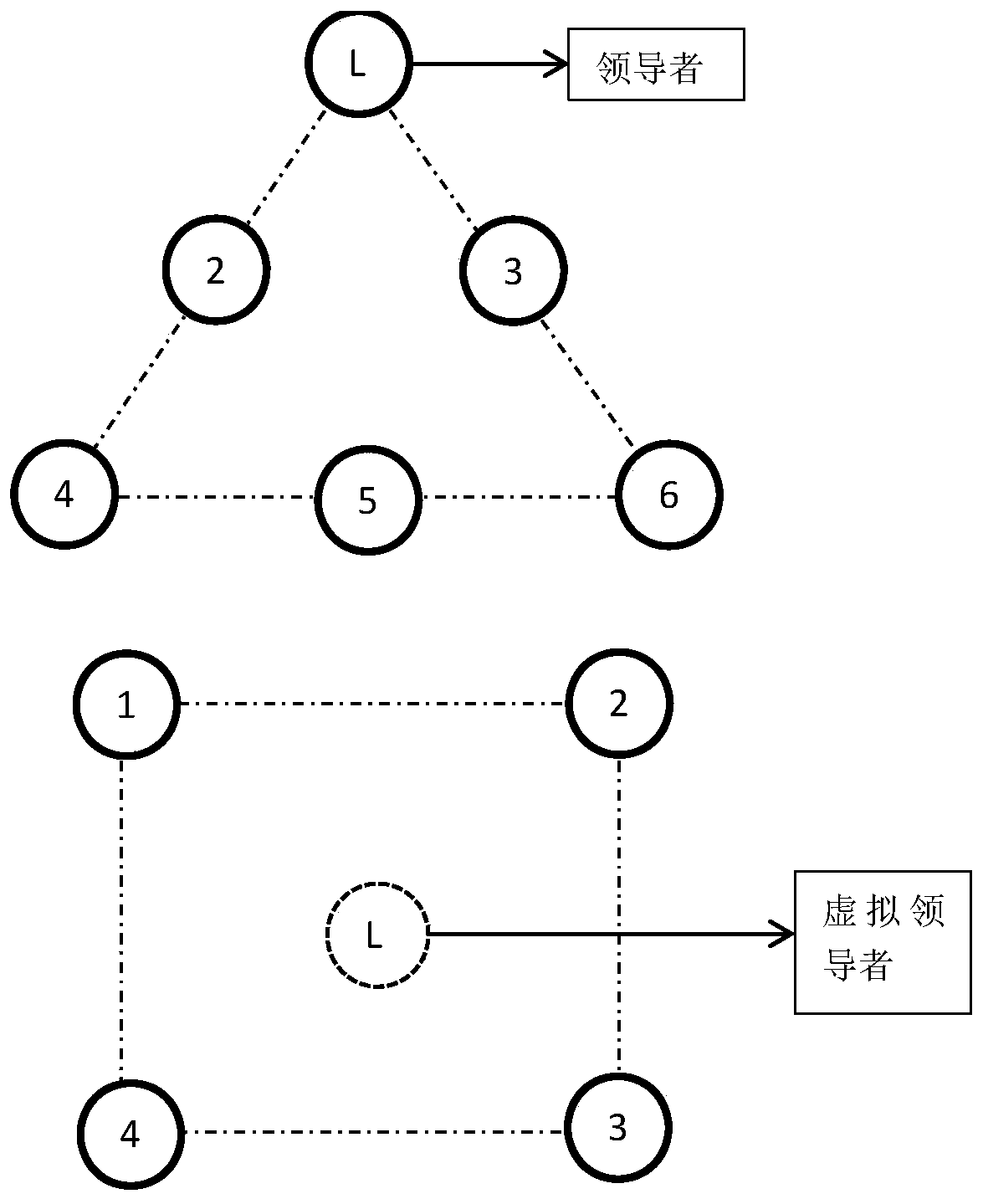
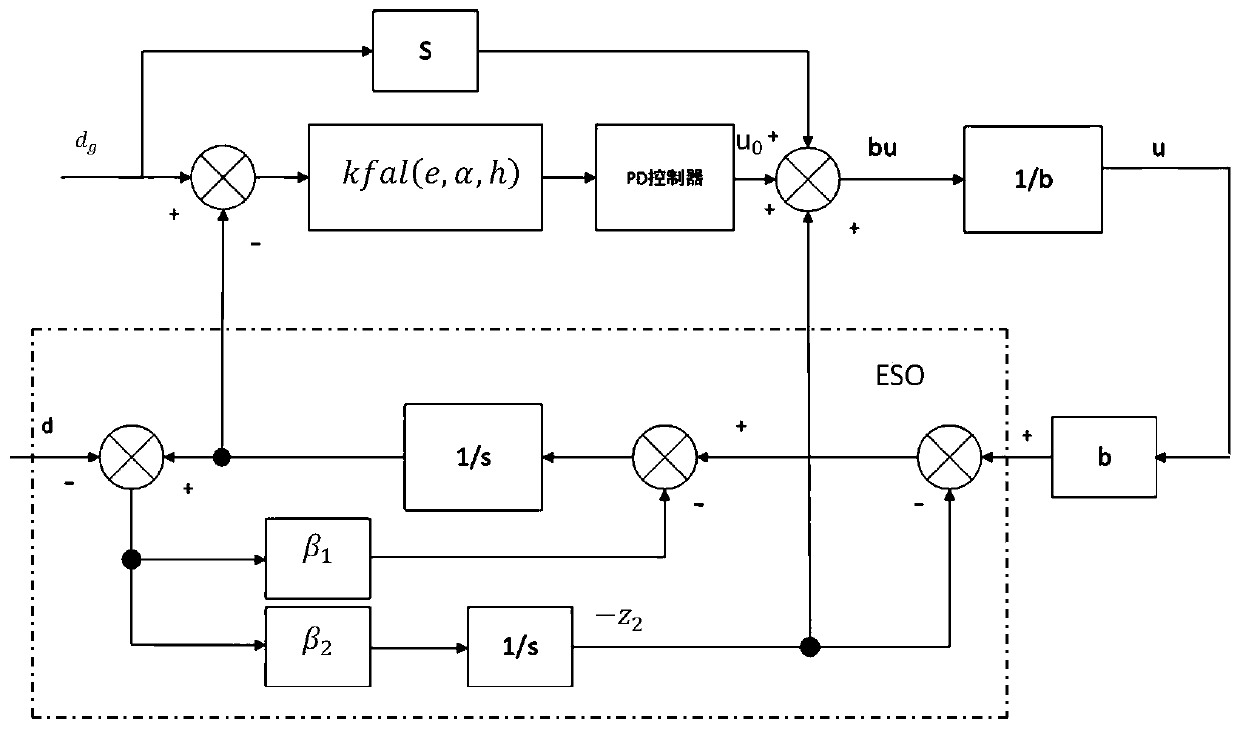
[0042] Step 1: In the relative distance control of the multi-agent system, establish a first-order control model. The model establishment process is as follows: the controlled object is the relative position between the follower and the leader, and the observed object is the distance between the follower and the leader. distance, assuming that the first-order controlled object model is as follows:
[0043]
[0044] Among them, u is the control input, d is the output of the system, b is the control variable coefficient, f(d,w,t) is a function related to the current relative distance and disturbance, and is the total disturbance of the system.
[0045] System error e=d g -d,d g The given distance of the system is the relative distance required between the actual follower and the leader, then the error...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More