

Lower limb robot
A technology of robots and lower limbs, applied in the field of bionic robots, can solve the problems of inconvenient wearing for users, difficulty in ensuring accurate judgment of lower limb robots, and affecting the stability and accuracy of sensor current
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
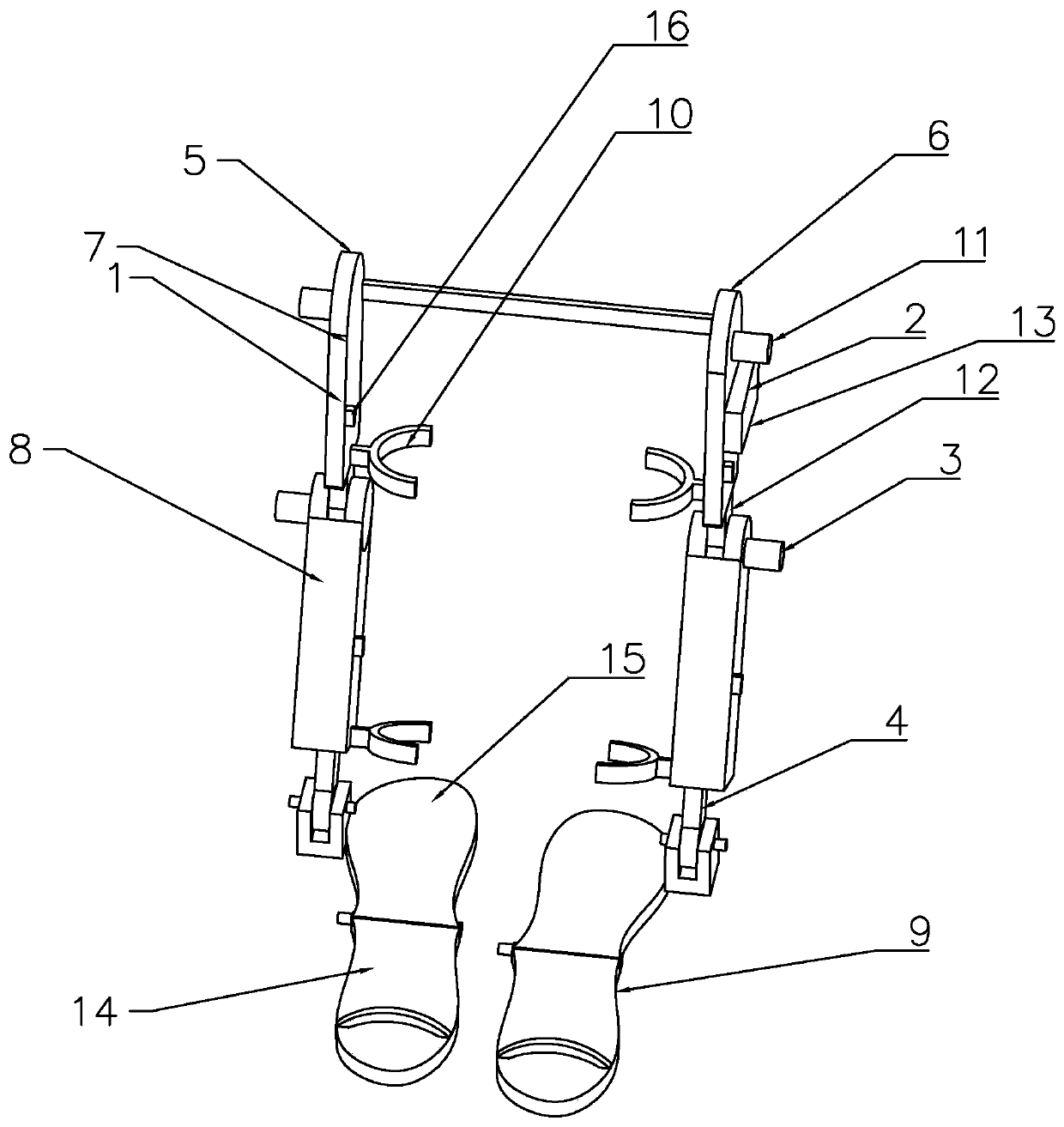
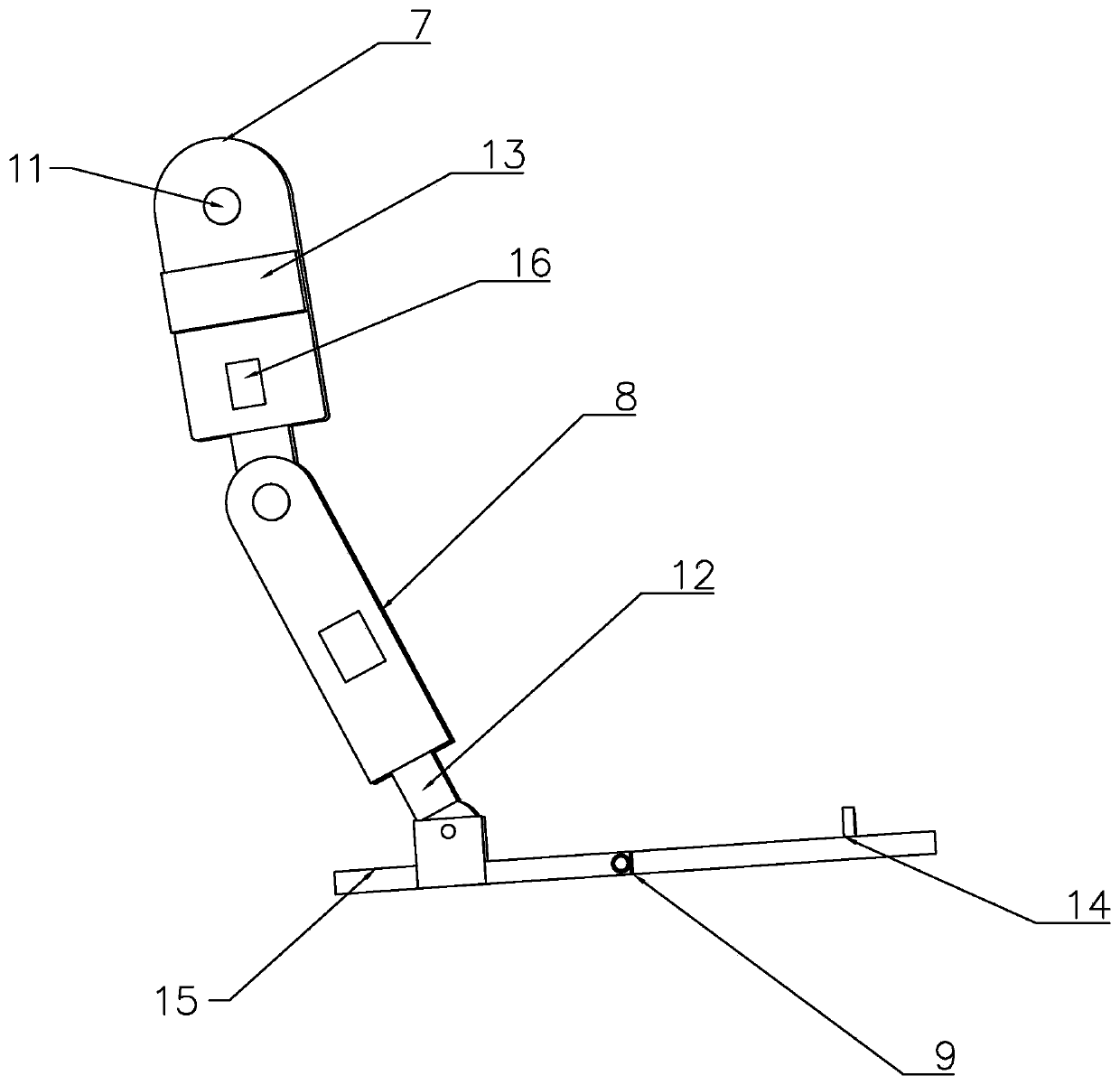
[0021] Such as Figure 1-3 As shown, a lower limb robot includes a mechanical module 1 for fixing the lower limbs of the human body and assisting the movement of the lower limbs of the human body, a control module 2 for controlling the movement of the mechanical module 1, and a driving module for providing power for the movement of the mechanical module 1 3 and a sensing module 4 for sensing the force on the lower limbs of the human body, the mechanical module 1 includes a left leg connecting element 5 and a right leg connecting element 6, and the left leg connecting element 5 and the right leg connecting element 6 both include a thigh Connecting element 7, shank connecting element 8, sole connecting element 9 and bandage 10 for fixedly connecting human lower limbs with thigh connecting element 7 and shank connecting element 8, said thigh connecting element 7 is movably connected with shank connecting element 8, so The shank connecting element 8 is movably connected with the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More