

Multi-unmanned surface vehicle (USV) group coordinated collision avoidance planning method based on genetic algorithm
A genetic algorithm and collision avoidance technology, which is applied in the field of USV control, can solve the problems of poor effectiveness, deletion and repair operations, and the inability to prove the validity of the algorithm, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings.
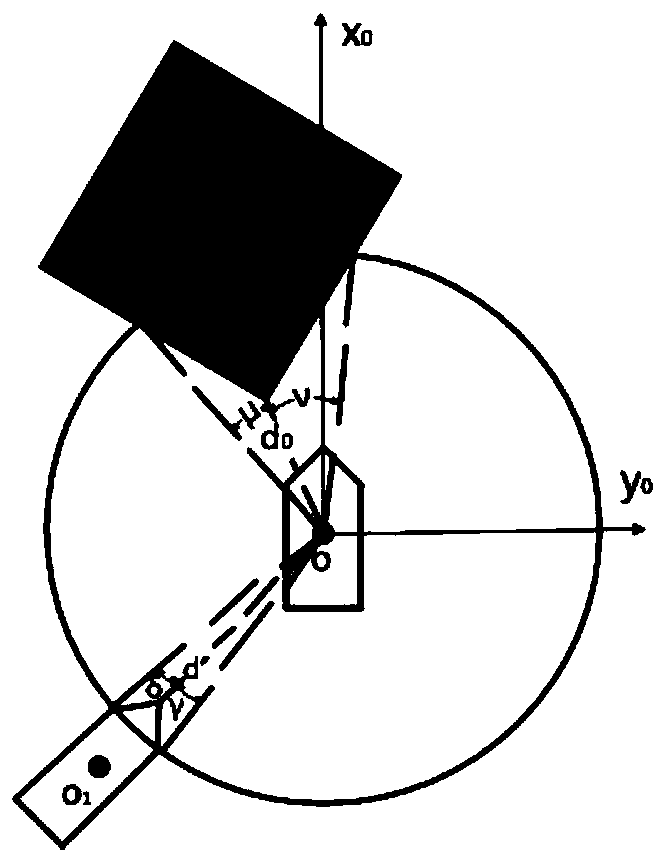
[0029] In the multi-USV group collaborative collision avoidance planning method, the geometric environment model is used to describe the USV navigation environment, the real-time position of the USV, etc., and the environment map assignment method indicates the existence of obstacles and other USVs.
[0030] The realization process of multi-USV group collaborative collision avoidance planning method is as follows:
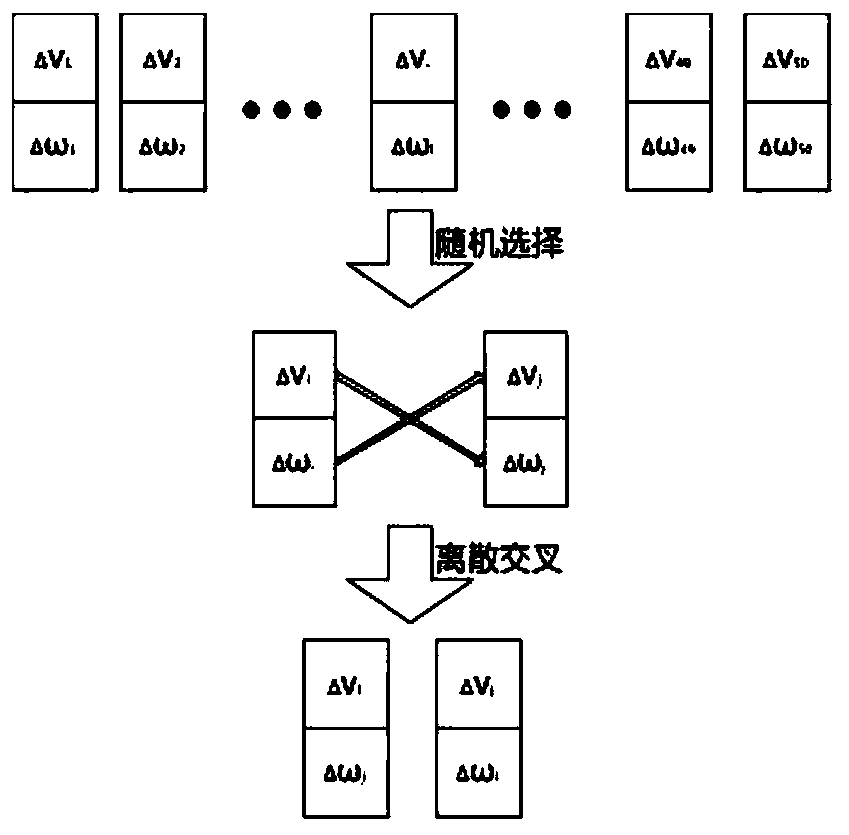
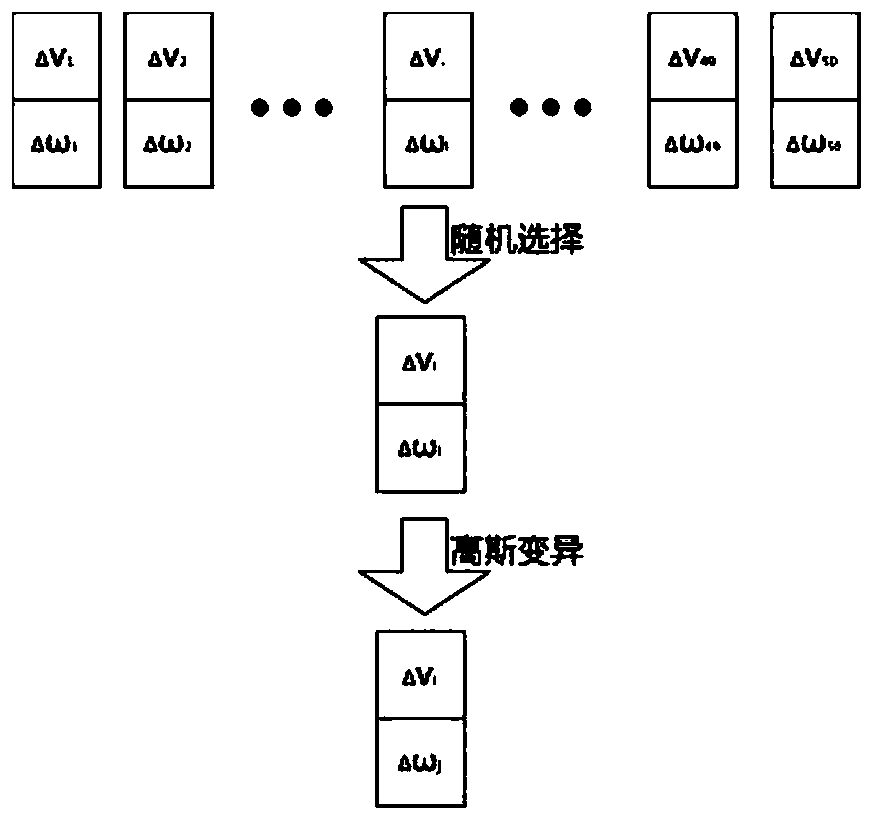
[0031] Step 1: Initialize and encode the speed adjustment and heading adjustment of the USV by means of floating-point number encoding, and set other control parameters of the algorithm.
[0032] Step 2: Construct an evaluation function by comprehensively considering smoothness and other indicators, and calculate the evaluation function value of each generation of individuals in the population, so as to perform genetic operations such as roulette selection,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More