

Three-dimensional object detection method based on Hash description and iteration nearest point
A technology that iterates the closest point and three-dimensional objects. It is applied in image data processing, instruments, calculations, etc., and can solve the problems of slow recognition speed and low positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
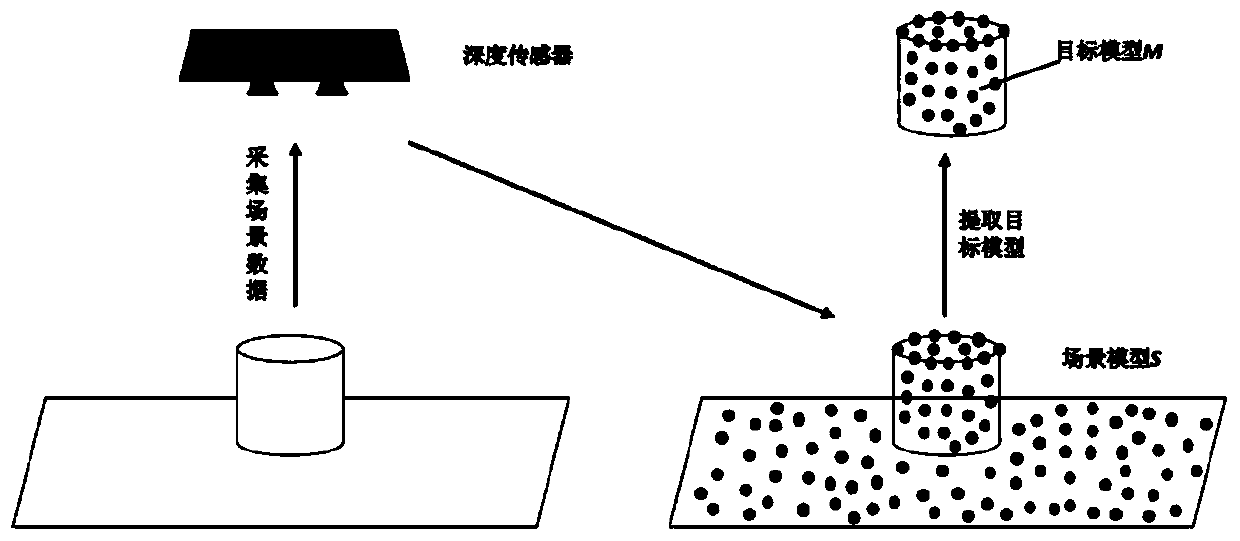
[0091] A three-dimensional object detection method based on hash description and iterative closest point, including a depth camera and a PC, further comprising the following steps:
[0092] S1. The depth camera collects the scene data of the object to be detected;
[0093] S2. The depth camera emits infrared rays to the scene, and the infrared receiver in the depth camera will receive the near-infrared reflection of the scene to generate three-dimensional point data of the scene, that is, the XYZ information of each reflection point in the scene relative to the coordinate system of the depth camera;
[0094] S3. The depth camera transmits the collected scene data to the PC for storage, and the storage format is PLY format;
[0095] S4. Using the scene data in PLY format acquired in S3 to extract the target model M of the detected object;
[0096] S5, the PC calculates the covariance matrix of each point of the three-dimensional model point cloud, obtains the eigenvector of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More