

UAV route correction system and correction method for hybrid rice pollination
A correction system and hybrid rice technology, applied in the field of UAV remote sensing, can solve the problems of slow pollination speed, inability to accurately control the altitude and position of the flight line, and a lot of labor, so as to ensure stable flight, improve the effect of pollination operations, and improve detection Effects of Accuracy and Speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with specific examples.
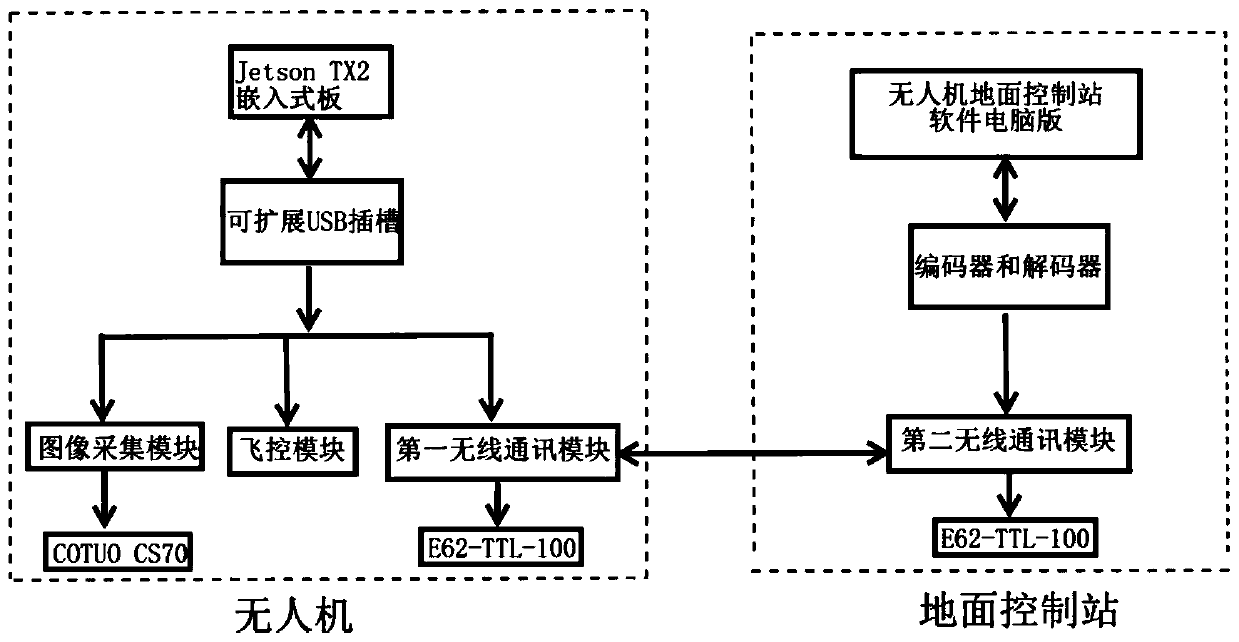
[0031] see figure 1As shown, the UAV route correction system for hybrid rice pollination provided in this embodiment includes a UAV and a ground control station; the UAV is a multi-rotor UAV, and the UAV is provided with Embedded board, flight control module, first wireless communication module, image acquisition module and satellite positioning device based on Jetson TX2; the flight control module is used to receive, decode and execute control commands from Jetson TX2 to control drone operations ; The first wireless communication module is a full-duplex wireless communication module E62-TTL-100; the image acquisition module is a sports camera COTUO CS70; the satellite positioning device is GPS; the ground control station includes an unmanned aerial vehicle The control station software computer board and the second wireless communication module; the second wireless communicat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More