

Global path planning method
A technology of global path planning and global planning, applied in the field of robotics, can solve the problems of many turning points and difficult to control the robot, and achieve the effect of less turning points, convenient and accurate motion control, and high computing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
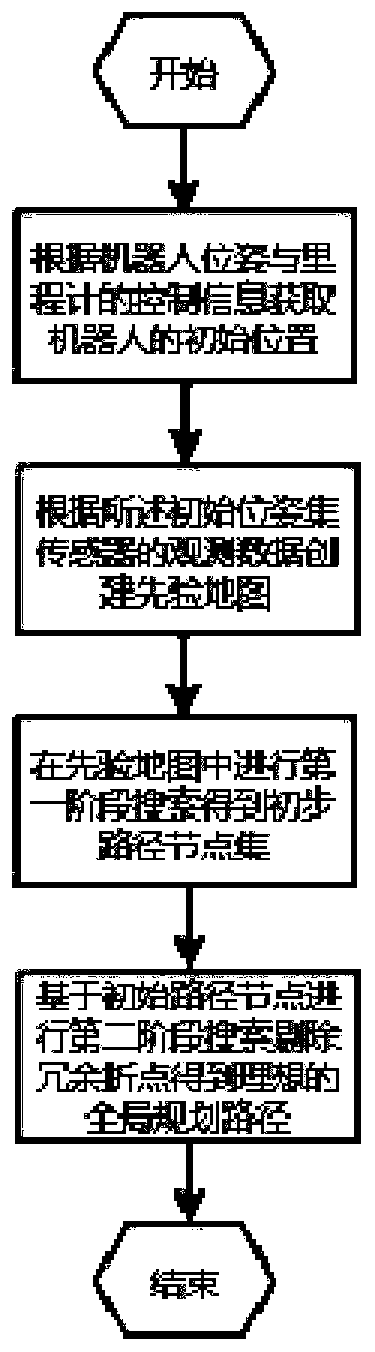
[0046] Such as figure 1 As shown, in order to overcome the deficiencies in the prior art, the present invention proposes a method for global path planning, including the following steps:
[0047] Positioning: Obtain the initial pose of the robot according to the control information of the robot pose and the odometer, that is, the robot accurately calculates its own pose information through the observed environmental information and combined with its own known state;
[0048] Create a priori map: Create a two-dimensional grid map through the initial pose and the observation data of the sensors carried by the robot itself. Preferably, each basic unit in the two-dimensional grid map has three states, namely: occupied, idle and Unknown, the way to know the robot’s navigation is based on the way the grid is occupied. The corresponding way is as follows: the grid occupancy state corresponds to an obstacle at this point on the map, and the robot cannot touch it during path planning; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More