

Multi-industrial-robot virtual offline co-simulation system and method
An industrial robot and co-simulation technology, which is applied in control/regulation systems, instruments, motor vehicles, etc., can solve the problem of virtual off-line co-simulation methods and system implementation processes that do not involve multiple robots, and do not involve the movement of multiple robot systems. Simulation and other issues to achieve the effect of improving development efficiency, lowering technical threshold, and improving enterprise production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
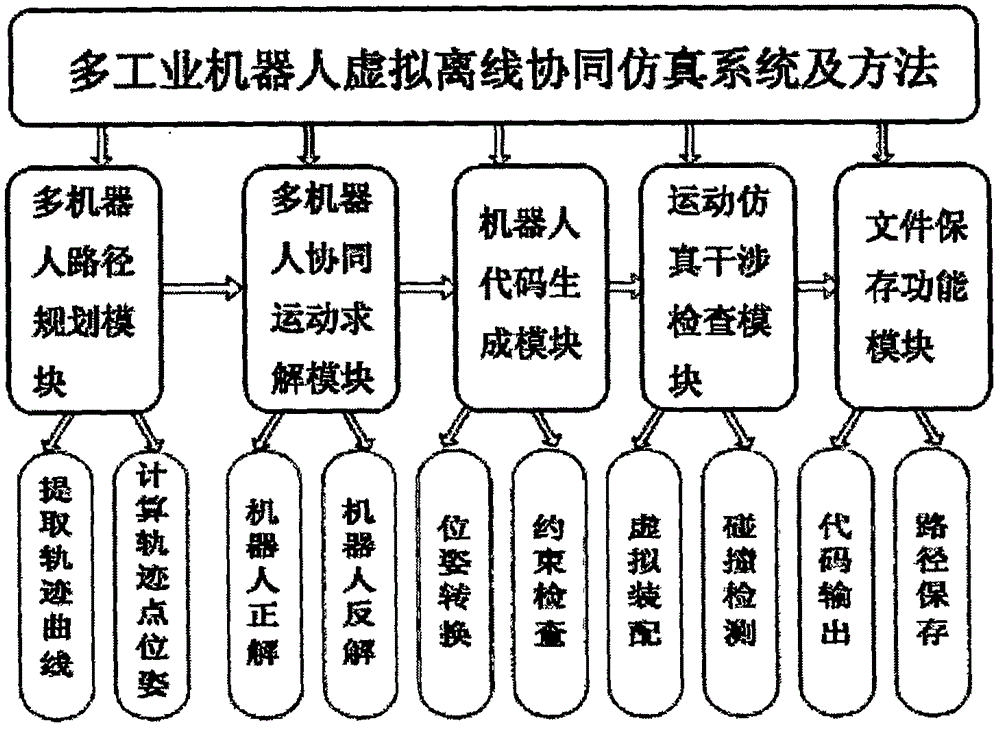
[0028] Such as figure 1 As shown, the multi-industrial robot virtual offline collaborative simulation system includes: a multi-robot path planning module, a multi-robot cooperative motion solution module, a robot code generation module, a motion simulation interference checking module and a file saving function module.
[0029] Such as figure 2 As shown, its method comprises the following working steps:
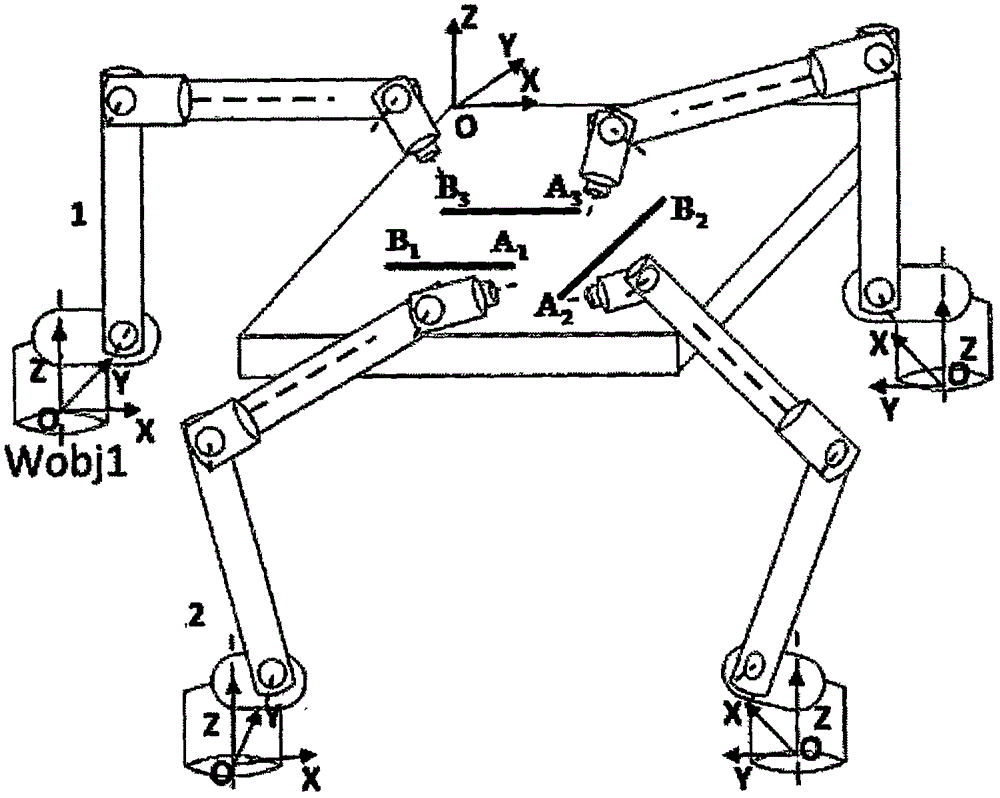
[0030] (1) Use the 3D modeling software core to import multiple robots, positioners and 3D digital models of workpieces to build a multi-robot virtual workstation;
[0031] (2) Use the workpiece digital model to extract the actual machining path of the robot, use the coordinates and orientation of the machining path to determine the path of a main robot relative to the absolute coordinate system, and use this path and the actual workpiece processing path to find the paths of other robots relative to the absolute coordinate system ;
[0032] (3) Robot kinematics analysis, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More