

Indirect measurement method based tool parameter calibration method for high-precision drilling robot
A tool parameter and calibration method technology, applied in manufacturing tools, measuring/indicating equipment, metal processing equipment, etc., can solve the problems of large errors, large errors, and difficulty in adapting to accuracy requirements in the calibration results, so as to achieve convenient application, improve Calibration accuracy and the effect of improving the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The steps of the tool parameter calibration method of the high-precision hole-making robot based on the indirect measurement method in the present invention are as follows:
[0023] Step 1: Use the laser tracker to establish the robot coordinate system;
[0024] The steps to establish the association between the laser tracker and the robot base coordinate system are:
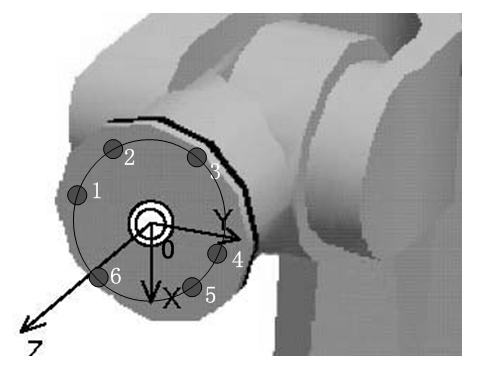
[0025] 1) The spherical fixed reflector SMR is fixed on the TCP of the end effector, and the position (angle) of the A2 to A6 axes is kept fixed. By rotating the A1 axis, a series of points on the circumference are measured with the FARO laser tracker ;
[0026] 2) Use the CAM2 Measure software that comes with FARO to sequentially fit the measurement points obtained in step 1) into a plane and a circle to obtain the theoretical coordinates of the center of the circle;
[0027] 3) Measure a series of points on the plane of the robot base and fit a plane, and then offset the plane by the SMR radius;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More