

Industrial robot vibration suppression method
An industrial robot and vibration suppression technology, which is applied in the field of robotics, can solve problems such as increasing the energy consumption burden of robots, affecting robot motion, and increasing costs, and achieve the effects of reducing robot costs and production line system costs, avoiding continuous impact, and improving work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
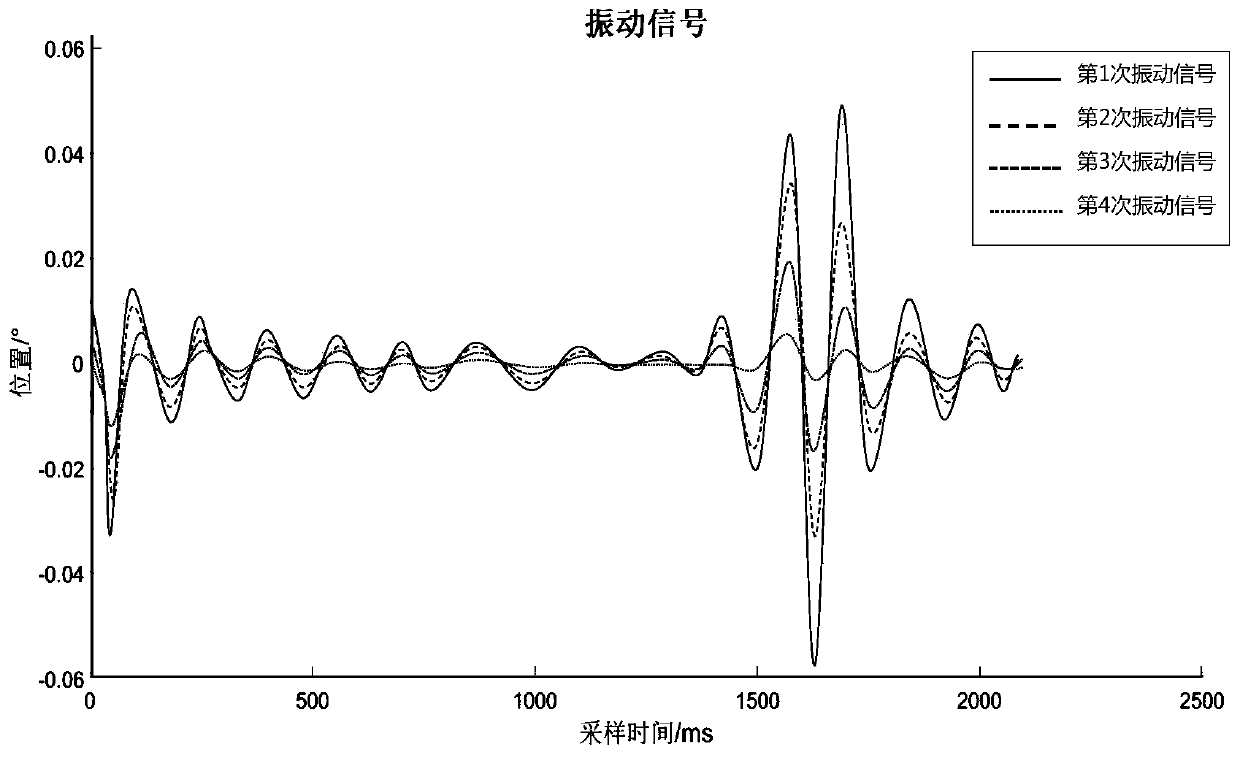
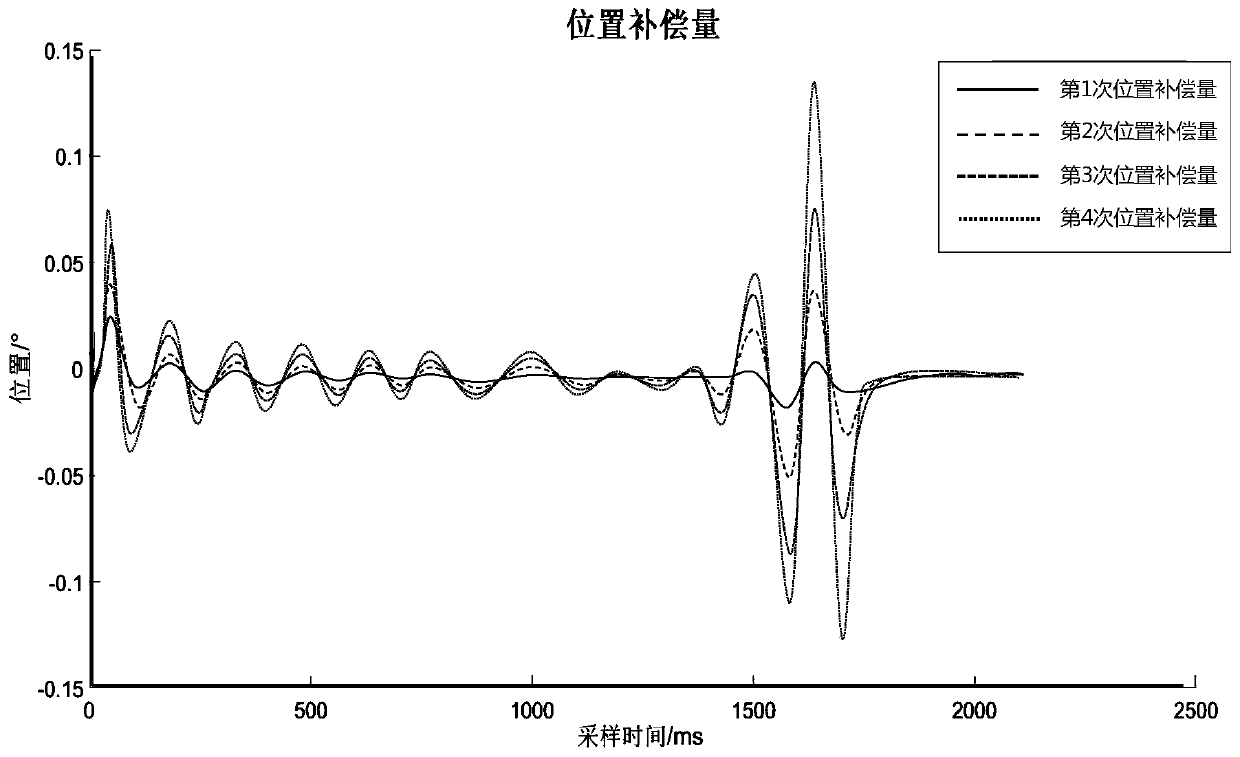
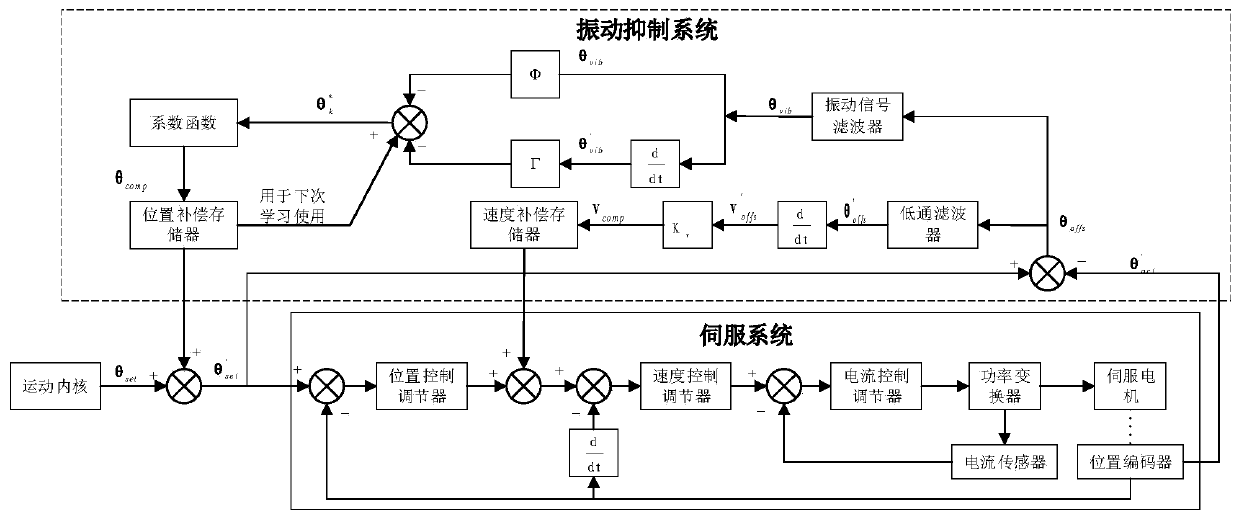
[0047]The purpose of the present invention is to provide a method for vibration suppression of industrial robots, by recording the given position and the actual position information fed back by the encoder by the control system in the process of recording the robot's action, and calculating the vibration suppression value according to the designed vibration suppression system The position compensation amount and the speed compensation amount, and finally add the position compensation amount to the given position and add the speed compensation amount by using the speed feedforward interface to realize the vibration suppression of the robot.
[0048] Hereinafter, a robot vibration suppression system according to an embodiment of the present invention will be described with reference to the drawings. figure 1 A configuration diagram showing a robot vibration suppression system according to an embodiment of the present invention.
[0049] The motion kernel performs kinematics plan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More