Control method of lower limb rehabilitative robot based on combination of robust control and admittance control
A rehabilitation robot and robust control technology, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as difficulty in offsetting external interference, and achieve the effect of increasing robustness, eliminating interference factors, and achieving good control effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
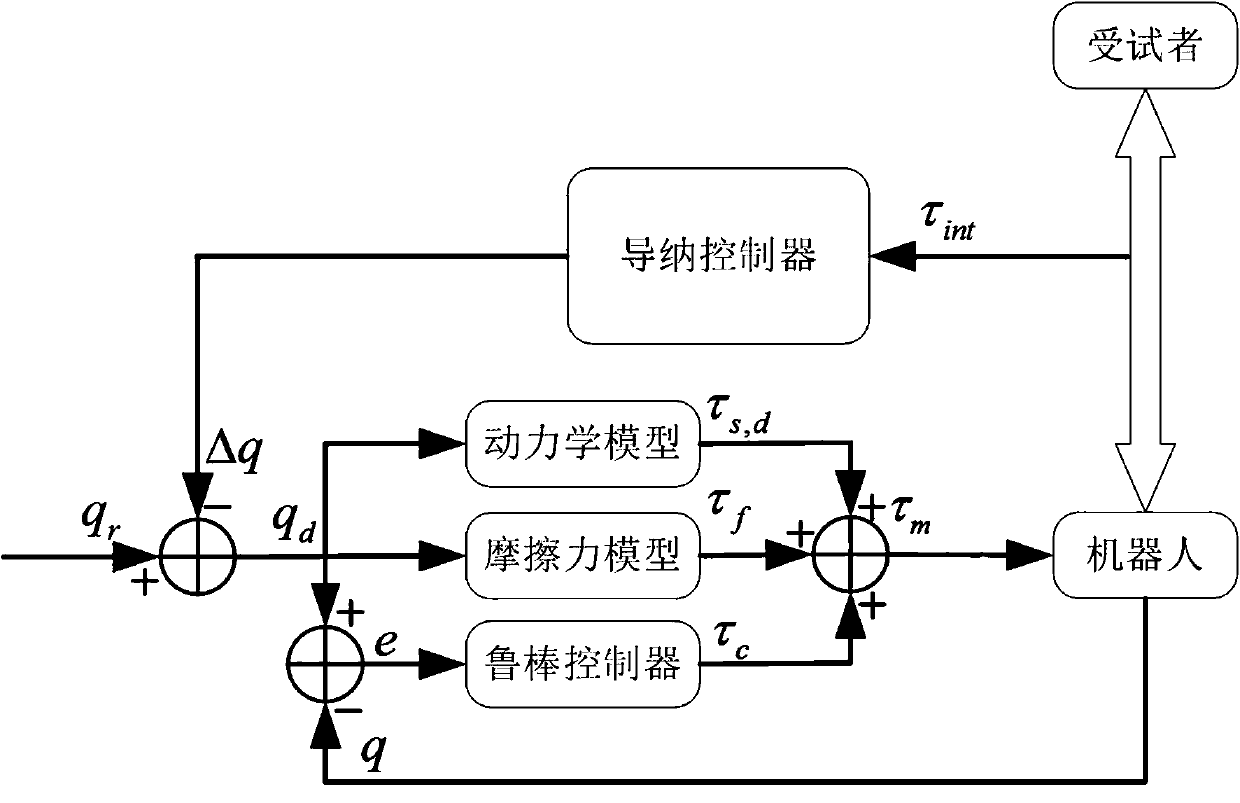
[0029] In this example, refer to the attached figure 1 , the control method for the rehabilitation robot is:
[0030] S1: Collect the angle signal q of the hip, knee and ankle joint positions, and collect the human-computer interaction torque signal τ int ;
[0031] S2: The human-computer interaction torque signal τ measured in real time int Enter the admittance controller, where the expression of the admittance controller is where τ int is the human-computer interaction torque, B and K are the damping and stiffness of the lower limbs respectively, and the desired angle correction signal Δq is obtained;
[0032] S3: Set the preset reference angle q r Superimposed with Δq to obtain the desired joint angle q d ;
[0033] S4: Superimpose the joint expected angle and the joint angle signal to obtain the angle error e; the joint expected angle q d , the joint angle q and the angle error e are input into the dynamic model; Get the ideal joint torque τ s,d ; Input the ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More