

Formation cooperation navigation method for unmanned aerial vehicle
A collaborative navigation and unmanned aerial vehicle technology, applied in the field of navigation, can solve problems such as unsatisfactory accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
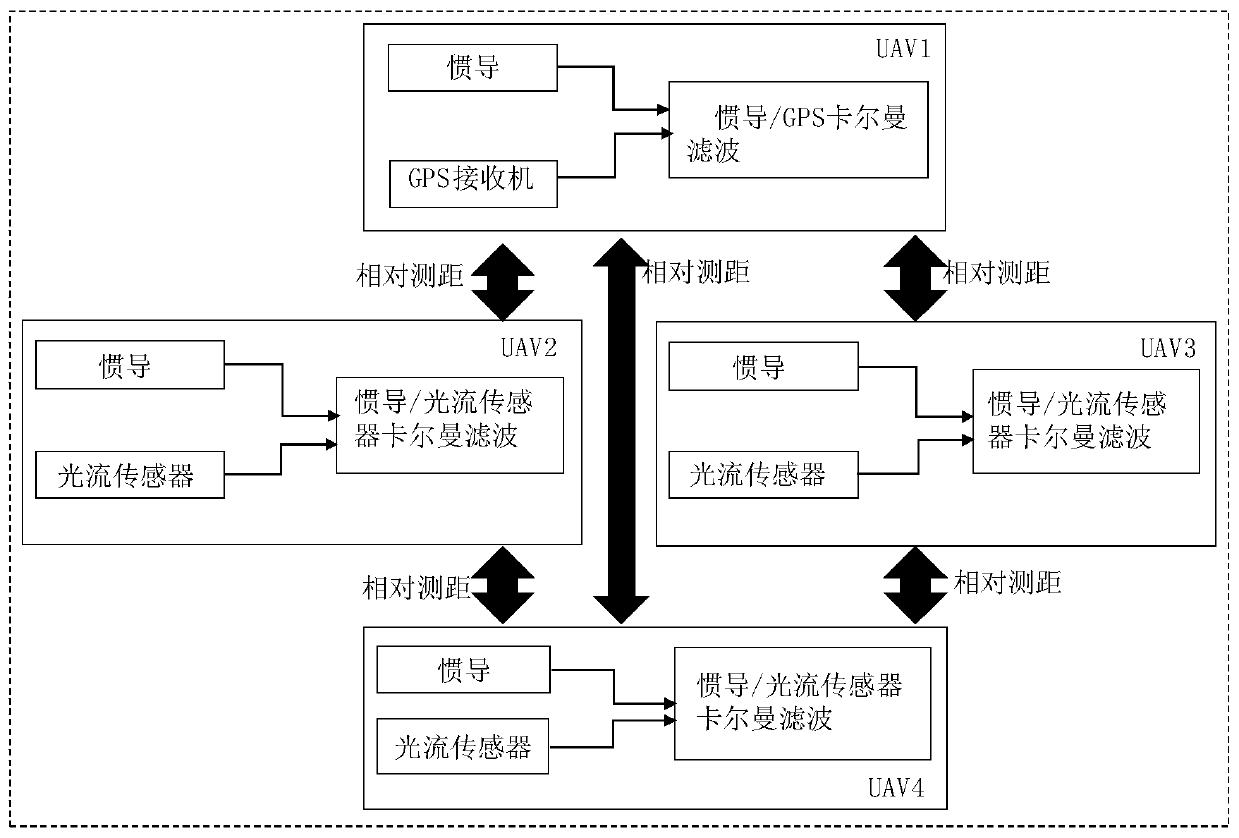
[0096] like figure 1 As shown, a UAV formation cooperative navigation method designed in the present invention, the UAV formation includes 4 UAV nodes: UAV nodes 1-4, including the following steps:
[0097] Step 1: Establish body coordinate system and navigation coordinate system;
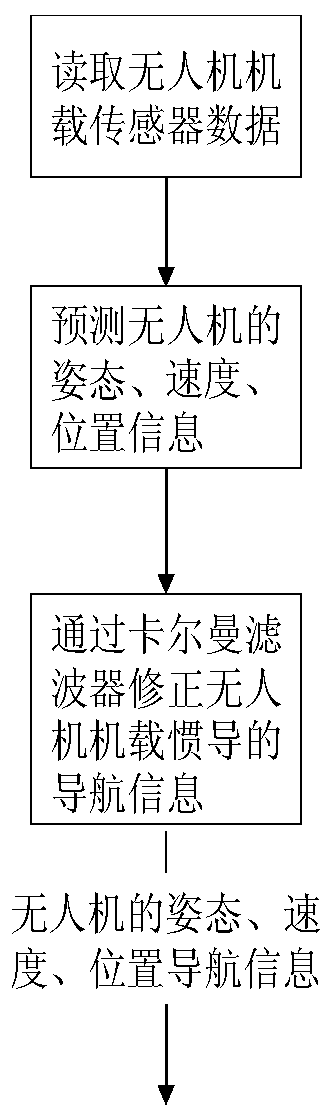
[0098] Step 2: Carry the inertial navigation system and GPS receiver on the UAV node 1, periodically read the airborne sensor information of the UAV node 1 at time k, including speed information, position information, gyroscope information and accelerometer information;
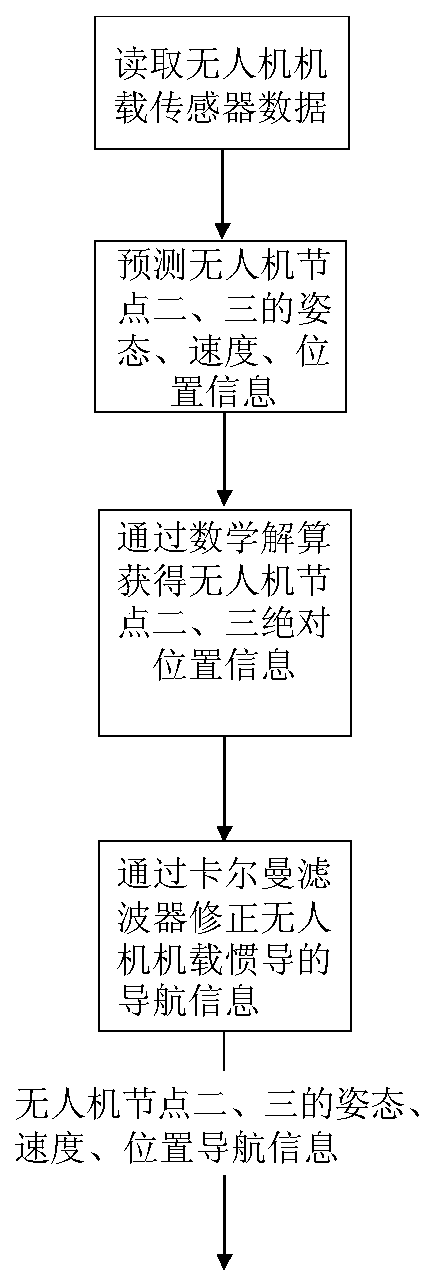
[0099]Step 3: Predict the attitude quaternion, speed and position information of UAV node i at time k, where i=1,2,3,4;
[0100] Step 4: Use the Kalman filter to correct the attitude quaternion, speed, and position information of the UAV node 1 at time k, and obtain the high-precision navigat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More