

Multi-rotor unmanned aerial vehicle blade capable of being disassembled and assembled rapidly
A multi-rotor unmanned aerial vehicle and blade technology, which is applied in the directions of rotorcraft, propellers, motor vehicles, etc., can solve the problems of inconvenient disassembly and assembly of UAV blades, and achieve simple and novel operation, simple structure, convenient and quick disassembly and assembly. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
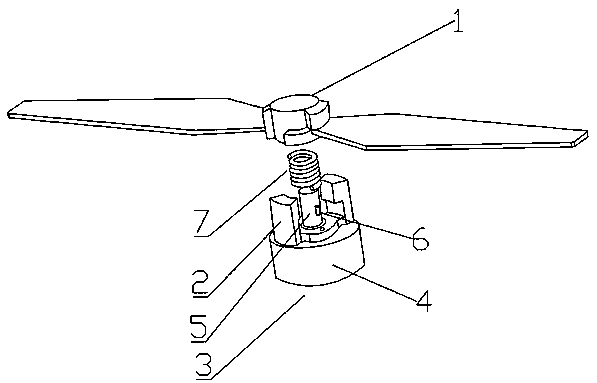
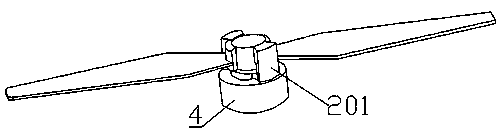
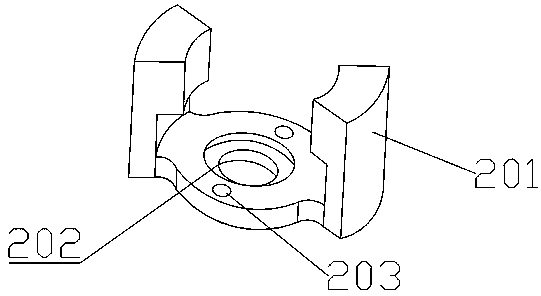
[0022] combined with figure 1 to attach Figure 4 , a multi-rotor drone blade that can be quickly disassembled, including a blade 1, a self-locking part 2 and a motor 3. The top of the rotor 4 of the motor is provided with an optical axis 5, and the optical axis 5 passes through the rotor 4 and is combined as a whole; the self-locking part 2 is connected with the rotor 4 of the motor 3 by a screw 6, and the self-locking There are two self-locking protrusions 201 on the inner wall of the part 2; the outside of the paddle 1 is provided with a self-locking groove 101 and a guide groove 102 for matching with the self-locking part 2, and the inside of the paddle 1 A cyl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More