

Asynchronous hysteresis compensation-linear quadratic H-infinity control method and system for piezoelectric deformable mirror
A linear quadratic type and control method technology, applied in the field of control, can solve problems such as inability to design inverse model controllers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The specific technical solution of the present invention will be further described below with reference to the accompanying drawings and specific embodiments, so that those skilled in the art can further understand the present invention.
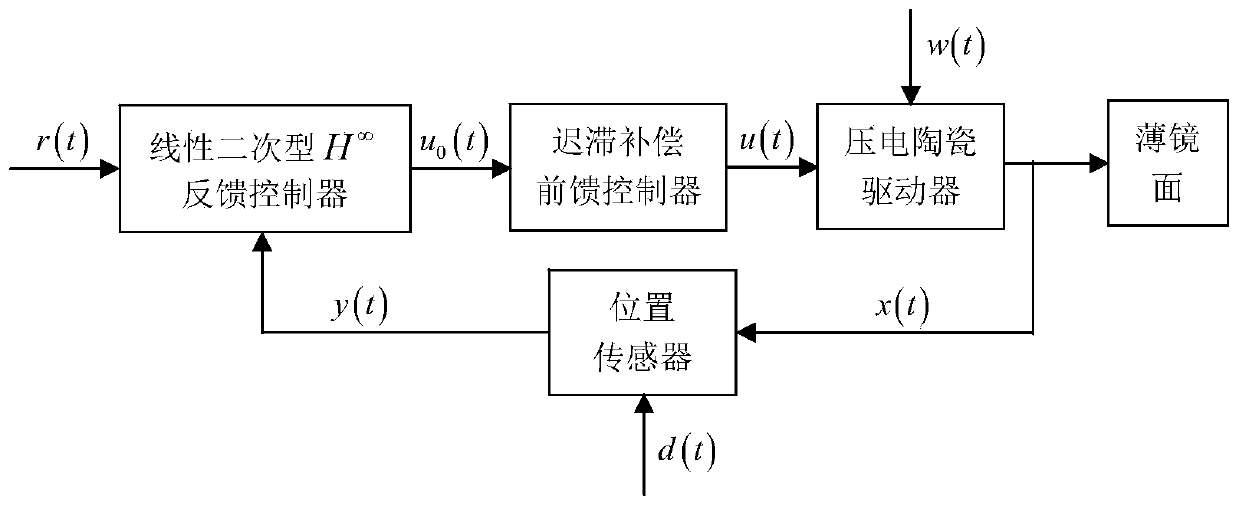
[0063] Such as figure 1 As shown, the asynchronous hysteresis compensation-linear quadratic type H of the piezoelectric deformable mirror in this embodiment ∞ The control system mainly includes the linear quadratic H ∞ Feedback controller and hysteresis compensated feedforward controller. Among them, the hysteresis compensation feedforward controller estimates and compensates the hysteresis characteristics of the piezoelectric ceramic driver to improve the linearity between the output displacement of the driver and the input voltage; the linear quadratic H ∞ The feedback controller further improves the performance indicators of the piezoelectric ceramic driver such as adjustment time, precision, energy consumption, and robustness, s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More