Two-translation and one-rotation large stroke uncoupled parallel piezoelectric micro-motion platform
A technology of micro-motion platform and large stroke, which is applied in the field of micro-displacement mechanism, two-translation and one-rotation large-stroke non-coupling parallel piezoelectric micro-motion platform, which can solve the problems of complex parallel structure, low natural frequency, and small working surface , to achieve the effect of simple and compact structure, enlarged displacement stroke and large working surface
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
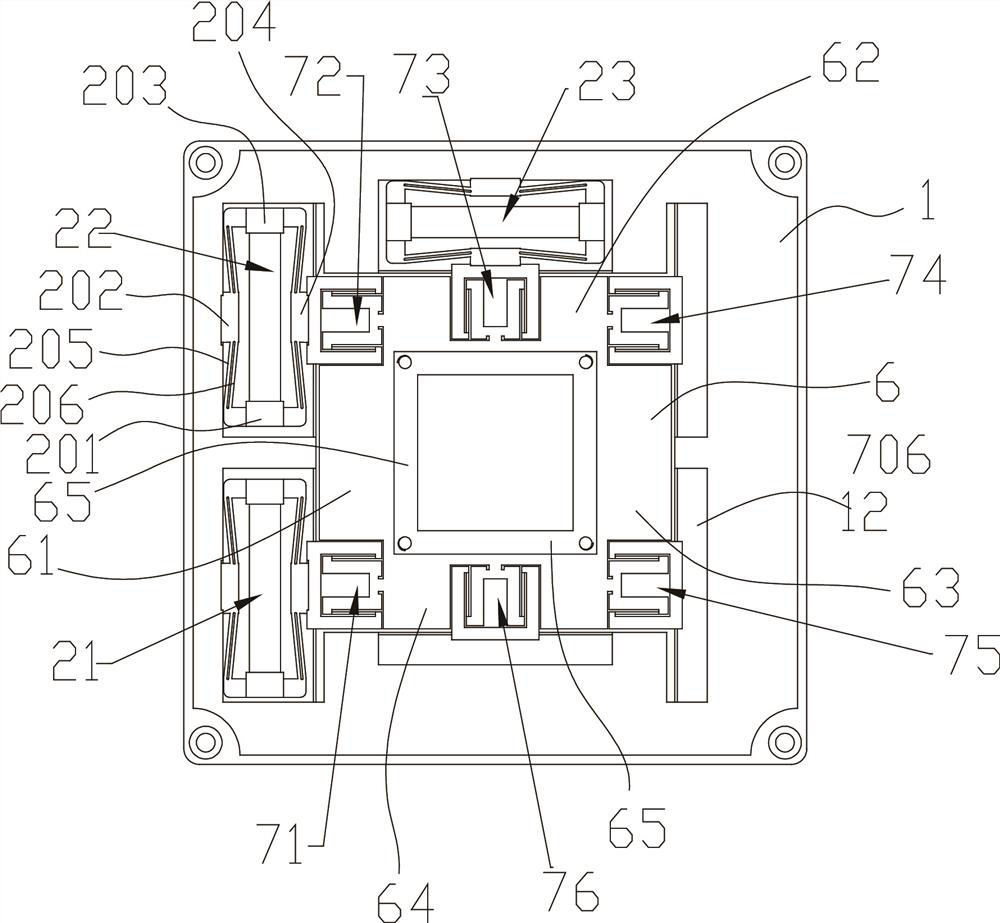
[0047] The first conduction part 71 to the sixth conduction part 76 of the first embodiment have two second receiving grooves 701, two rigid parts 703, and the first convex part 704, the second convex part 702 and the second convex part 702. The number of a flexible thin plate 705 is 2 and it is arranged between two adjacent rigid parts 703, and the two adjacent rigid parts 703 are integrally formed at one end located in the third receiving groove 12, Between the adjacent rigid parts 703, there is a hollow groove for screwing the screws into the fourth rigid block 204, such as Figure 9 shown.
Embodiment 2
[0048] The difference between Embodiment 2 and Embodiment 1 is that the fourth conducting portion 74 to the sixth conducting portion 76 of Embodiment 2 do not have hollow grooves, such as Figure 10 shown.
Embodiment 3
[0049] The difference between Embodiment 3 and Embodiment 1 is that the number of second receiving grooves 701 of the fourth conduction part 74 to the sixth conduction part 76 of Embodiment 3 is one, the number of rigid parts 703 is one, and the first The number of the convex part 704, the second convex part 702 and the first flexible thin plate 705 are respectively 2 and are respectively arranged on both sides of the rigid part 703, such as Figure 11 shown.
[0050] The first rigid block 201, the second rigid block 202, the third rigid block 203, the fourth rigid block 204, the third flexible thin plate 205 and the fourth flexible thin plate 206 are composed of a bridge-type amplifying mechanism 2 integrally formed structure; fixed platform The body 11 , the second flexible thin plate 706 , the rigid portion 703 , the first convex portion 704 , the first flexible thin plate 705 , the second convex portion 702 and the moving table body 6 are integrally formed. Let the z-axis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com