

Control method of finite time convergence attitude of four-rotor unmanned aerial vehicle
A four-rotor unmanned aerial vehicle, limited time technology, applied in the direction of attitude control, etc., can solve the problems of weakening the control effect of the controlled object near the non-equilibrium point, and the disturbance of the unmanned aerial vehicle cannot be ignored
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
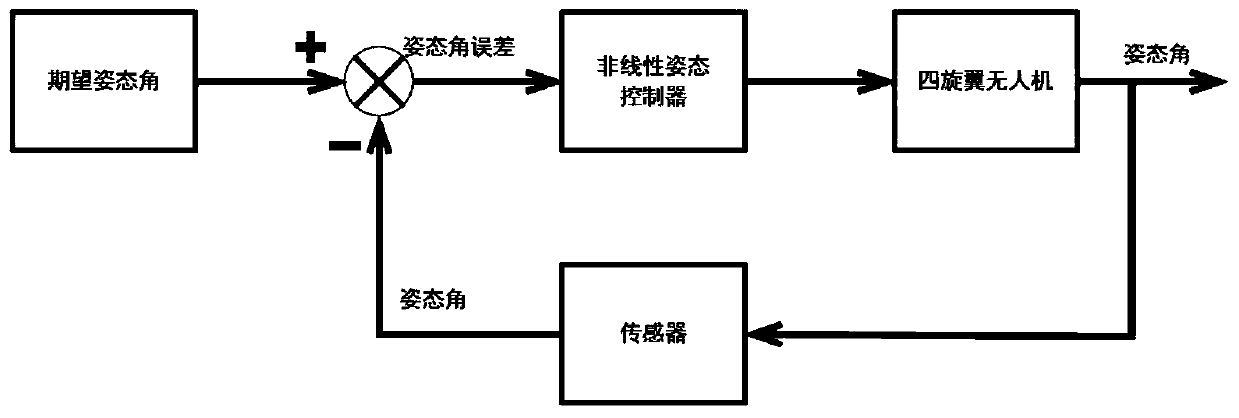
[0057] In order to overcome the existing deficiencies, the present invention will design a nonlinear attitude controller for the quadrotor UAV. The nonlinear attitude controller acts in the quadrotor UAV system figure 2 There are concrete manifestations. The technical scheme adopted in the present invention is a nonlinear attitude control method of a quadrotor UAV. Proceed as follows:
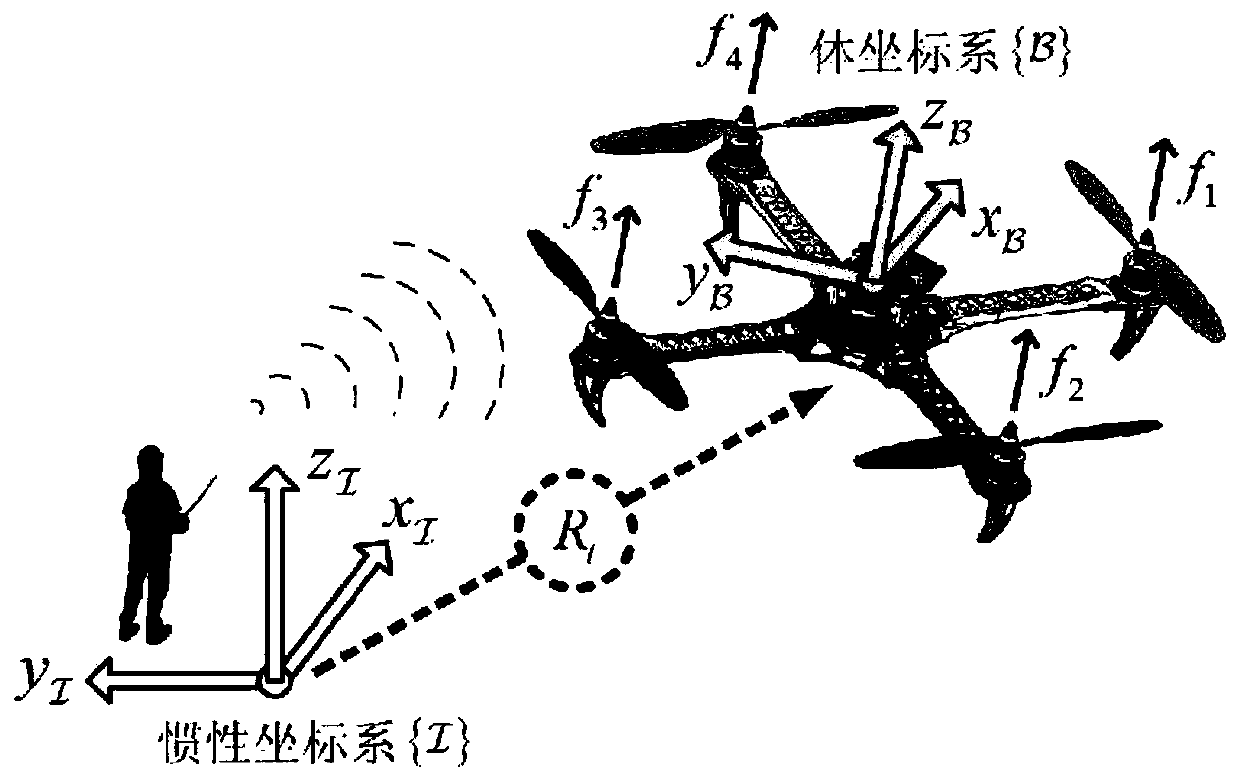
[0058] 1) Establish a quadrotor UAV dynamics model
[0059] The present invention adopts the Newton-Euler method to establish the dynamic model of the quadrotor UAV, and the expression is as follows:
[0060]
[0061] The variables in formula (1) are defined as follows: for drone quality, is the spatial position vector of the UAV in the inertial coordinate system. And g=9.8m / s 2 represents the acceleration due to gravity. is the translational damping coefficient matrix, K x , K y , K z are constant parameters, and are the air damping coefficients of the UAV along the three ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More