

An outdoor mobile robot guidance method and guidance system
A mobile robot and robot technology, applied in the field of unmanned systems, can solve the problems of waste of space, excessive dependence on heading angle accuracy, and inability to correct the lateral deviation of the target trajectory, and achieve the effect of correcting the angle error and correcting the lateral deviation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
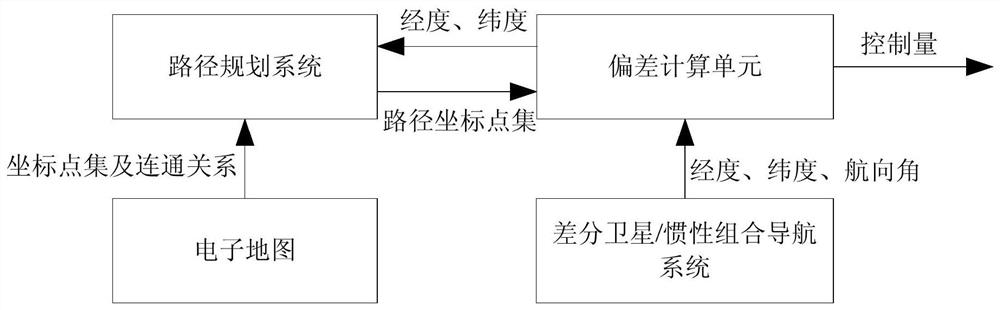
[0057] The guidance system of the present invention is composed of an electronic map, a path planning system, a deviation calculation unit, and a differential satellite / inertial combined navigation system, such as figure 1 shown. The electronic map includes a number of longitude and latitude coordinate sets within the moving range obtained by surveying and mapping and the connectivity between the coordinates. The path planning system generates a planned path based on the electronic map, the latitude and longitude calculated by the guidance system, and the latitude and longitude of the target point. The path is composed of a sequence of coordinate points, and the sequence of coordinate points is sent to the deviation calculation unit in sequence. The deviation calculation unit generates multiple guide lines according to the planned co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More