

Neural network S-plane control method for autonomous underwater vehicle
An underwater robot and neural network technology, applied in the field of control, can solve problems such as difficult to adapt to complex and changing marine environments, difficult to obtain optimal control parameters, and affect the effect of motion control, etc., to achieve the effect of strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0037] Before describing this embodiment, the parameters are described first;
[0038] Controller structure related parameters:
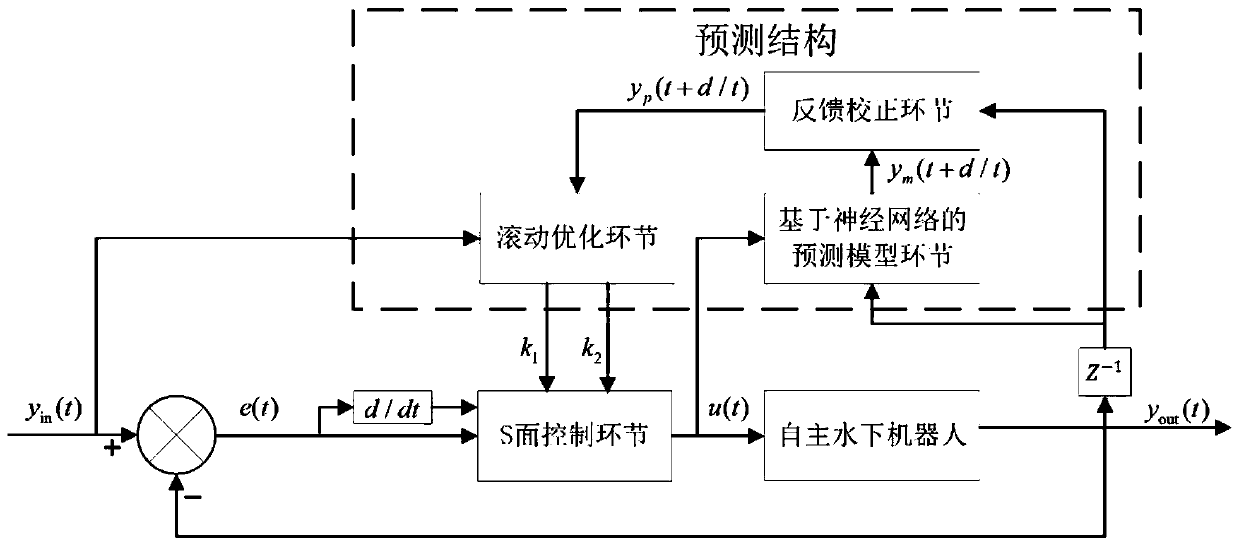
[0039] k 1 ,k 2 are the control parameters of the S surface controller; u is the output control quantity of the S surface control module; y in Control target amount for AUV movement; y m is the predicted value of the AUV state output by the prediction model module; y p is the predicted value of the AUV state output by the feedback correction module; y out is the state quantity actually output by AUV; N is the number of control beats contained in each parameter adjustment beat.
[0040] Related parameters of the S surface control link:
[0041] o s for the control output; is the rate of change of the deviation between the actual state quantity of the AUV and the target quantity; T max The maximum thrust (torque) that can be provided for the autonomous underwater vehicle; T c is the actual output thrust (torque) after inverse normalization;...
specific Embodiment approach 2
[0135] The AUV control model described in this embodiment can have various forms, that is, the control method of the present invention can be applied to various forms of AUV control models. In some embodiments, the AUV control modeling process is as follows:
[0136] The following two right-handed coordinate systems are established: one is the fixed coordinate system E-ξηζ, which is fixed on the earth; the other is the moving coordinate system O-xyz, which moves with the underwater robot [4]. The origin E of the fixed coordinate system E-ξηζ can be selected at any point on the earth, the ξ axis is located on the horizontal plane, and the projection of the main course of the underwater robot on the horizontal plane is taken as the positive direction; the η axis is also located on the horizontal plane, and the Eξ axis is clockwise according to the right-hand rule Rotate 90°; the ζ axis is perpendicular to the ξEη coordinate plane, pointing to the center of the earth is positive....
specific Embodiment approach 3
[0183] In this embodiment, the input-output relationship of each layer in the Elman neural network is determined in the following manner:
[0184] The Elman neural network is used to establish the multi-step recursive prediction model of the controller. The standard Elman neural network structure is generally divided into input layer, hidden layer, structure layer and output layer. The nonlinear state space expression is as follows
[0185]
[0186] In the formula, u(t) is the input of the input layer at time t; y(t) is the output of the input layer at time t; x c (t) is the output of the structural layer at time t; x(t) is the output of the hidden layer at time t; w (1) is the weight between the structural layer and the hidden layer; w (2) is the weight between the input layer and the hidden layer; w (3) is the weight between the hidden layer and the output layer; θ (1) is the hidden layer unit threshold; θ (2) is the threshold of the output layer unit; f( ) and g( ) a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More