

Snake-like robot mixed three-dimensional gait control method
A gait control and robot technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of snake-like robots, such as insufficient gait adaptability, high requirements for the exercise environment, and slow speed, so as to improve the environmental adaptability and sports performance, expanding gait types, and simple control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings.
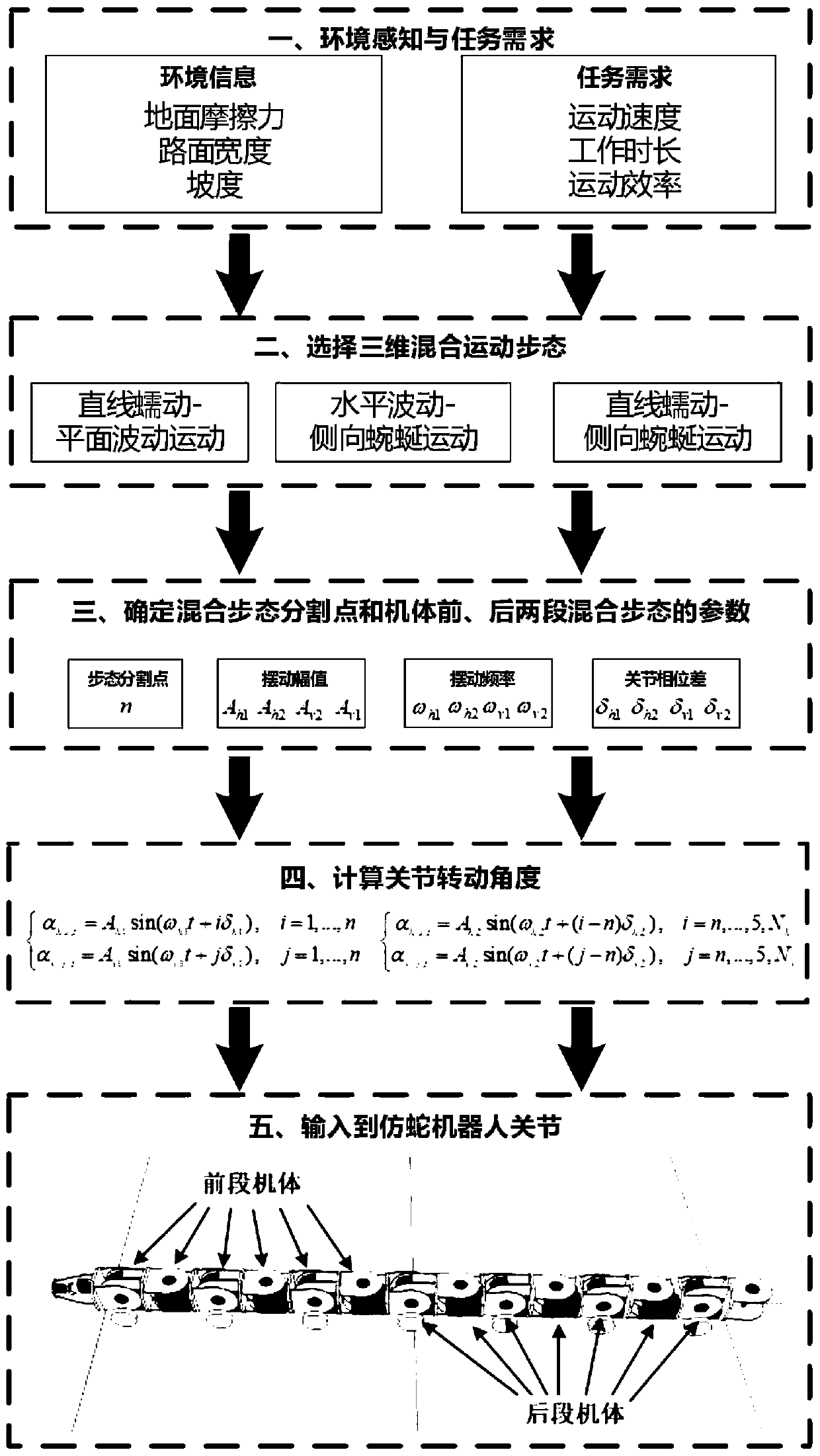
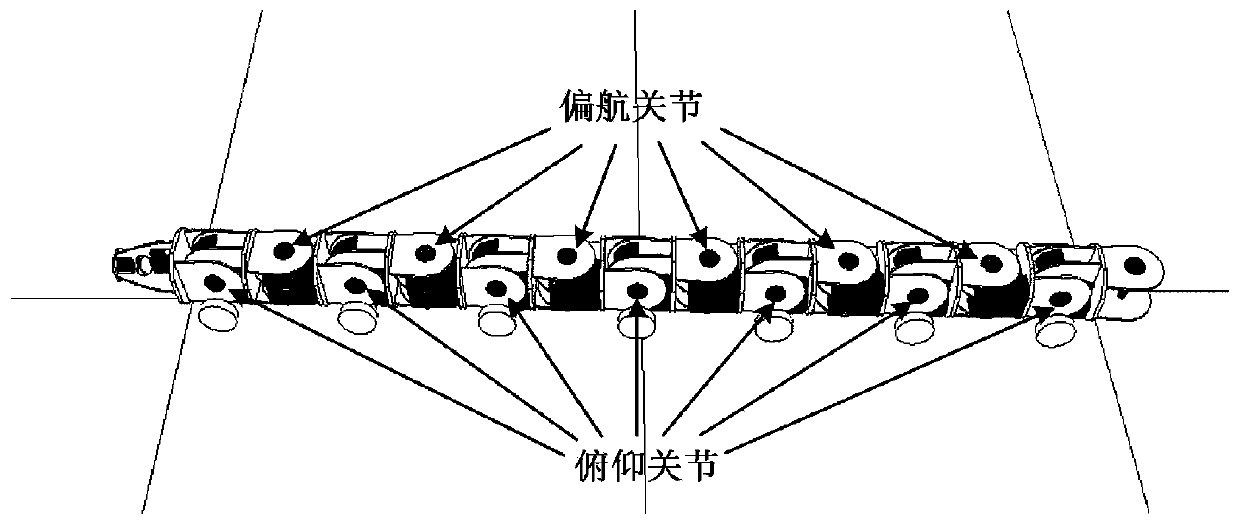
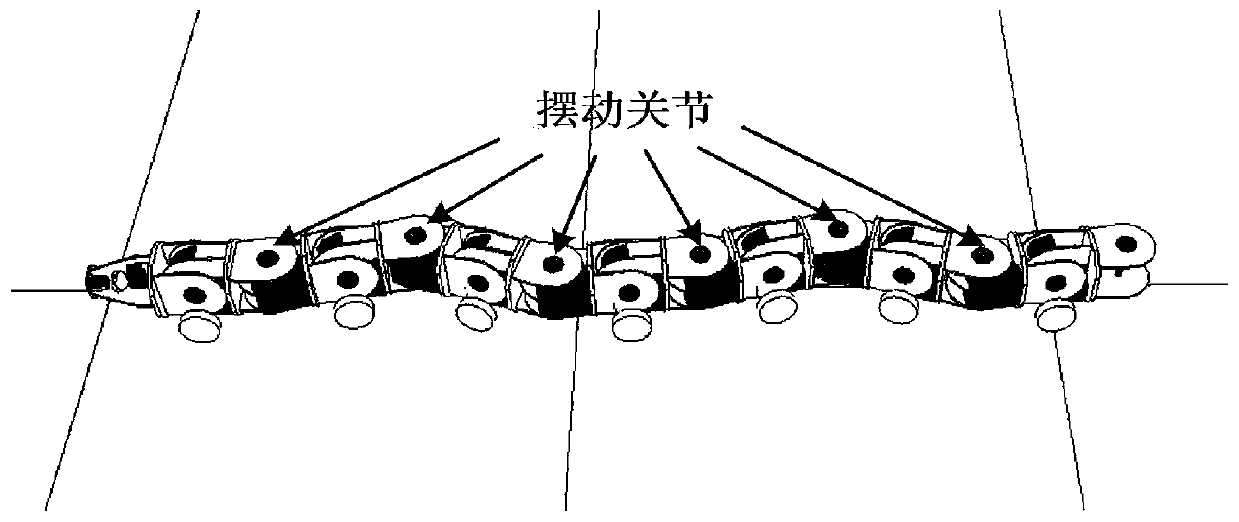
[0043] see Figure 4.1 , the hybrid gait of the snake-like robot linear peristalsis-horizontal undulating motion provided by the present invention; the first n joints perform linear peristaltic motion, and the following joints perform horizontal undulating motion. The joint control functions of the front and rear body joints of the snake-like robot are as follows:
[0044]
[0045]
[0046] where N h is the total number of yaw joints, N v is the total number of pitch joints, n is the separation position of two gaits, A v is the amplitude of the swing angle function of the pitch joint of the front body, ω v is the frequency of the swing angle function of the pitch joint of the front body, δ v is the phase difference of the front body pitch joint swing angle function; A h is the amplitude of the swing angle function of the rear body yaw joint, ω h is the fre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More