

Bridge detecting unmanned aerial vehicle system in non-satellite navigating and positioning environment
A bridge detection and satellite navigation technology, applied in bridges, bridge parts, bridge construction, etc., to reduce blind spots and solve limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0093] Example 1: Detection of bridge bottom cracks and bolt drop-off points
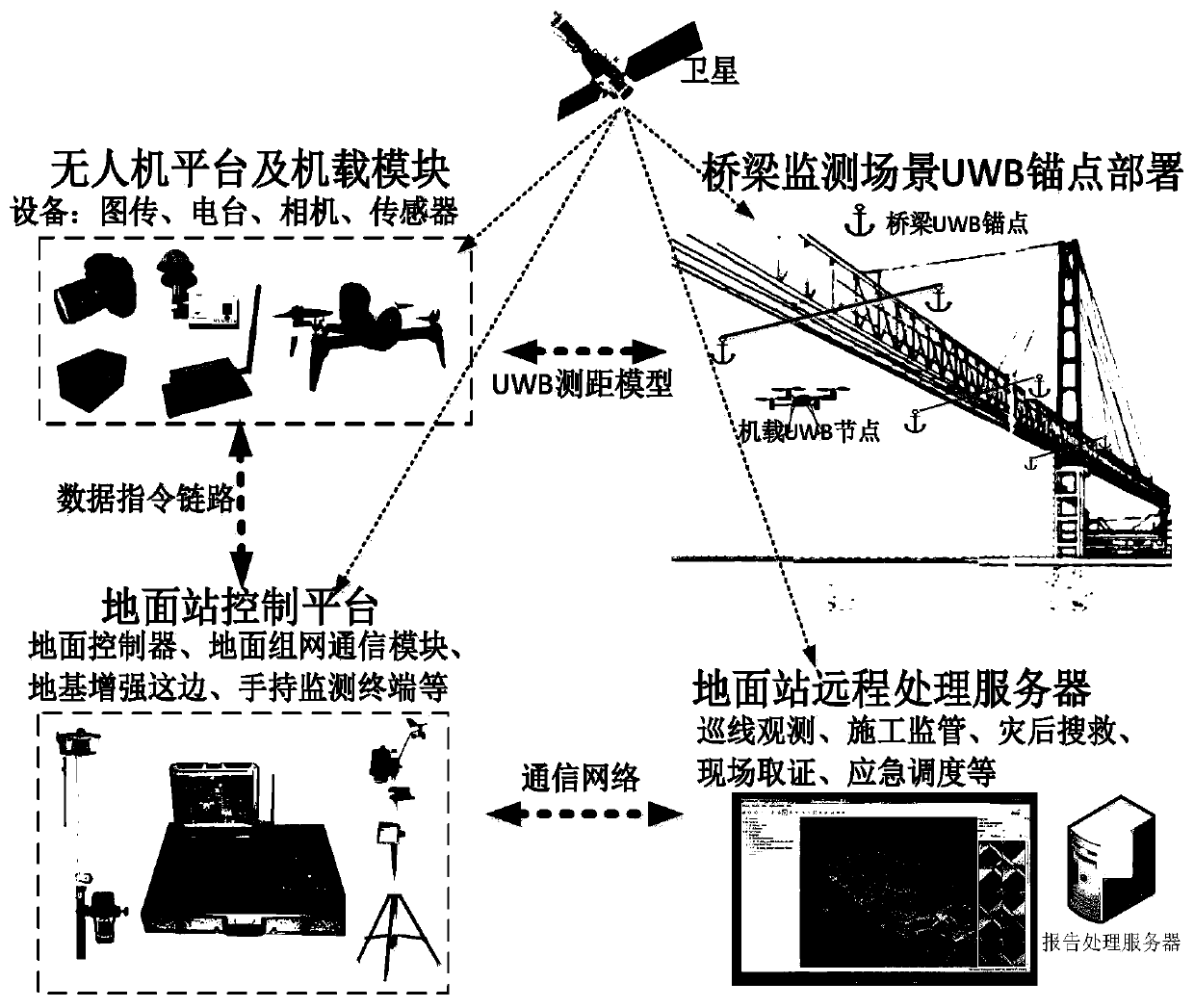
[0094] The present invention will be further described below in conjunction with the accompanying drawings. The system follows the steps below to detect the condition of the bolts at the bottom of the bridge:
[0095] Step 1, fix the four UWB base stations on both sides of the bridge with carbon fiber poles, and ensure that the drone flies within the range of the four anchor points. Preset the position coordinates of the four base stations in the ground station software.
[0096] Step 2. According to the judgment of light and shade, choose to place a high-definition camera on the drone. In order to detect the condition of the bolts at the bottom of the bridge, a high-definition camera and radar were chosen to be placed on top.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More