

Robot dynamic tracking and grabbing system and method of easily-damaged articles
A dynamic tracking and robotic technology, applied in conveyors, conveyor objects, conveyor control devices, etc., can solve the problems of insufficient robot grasping accuracy, particularly high accuracy requirements, and vulnerable items, etc., to reduce time and improve. The effect of grasping precision and high practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with specific embodiment, further illustrate the present invention.
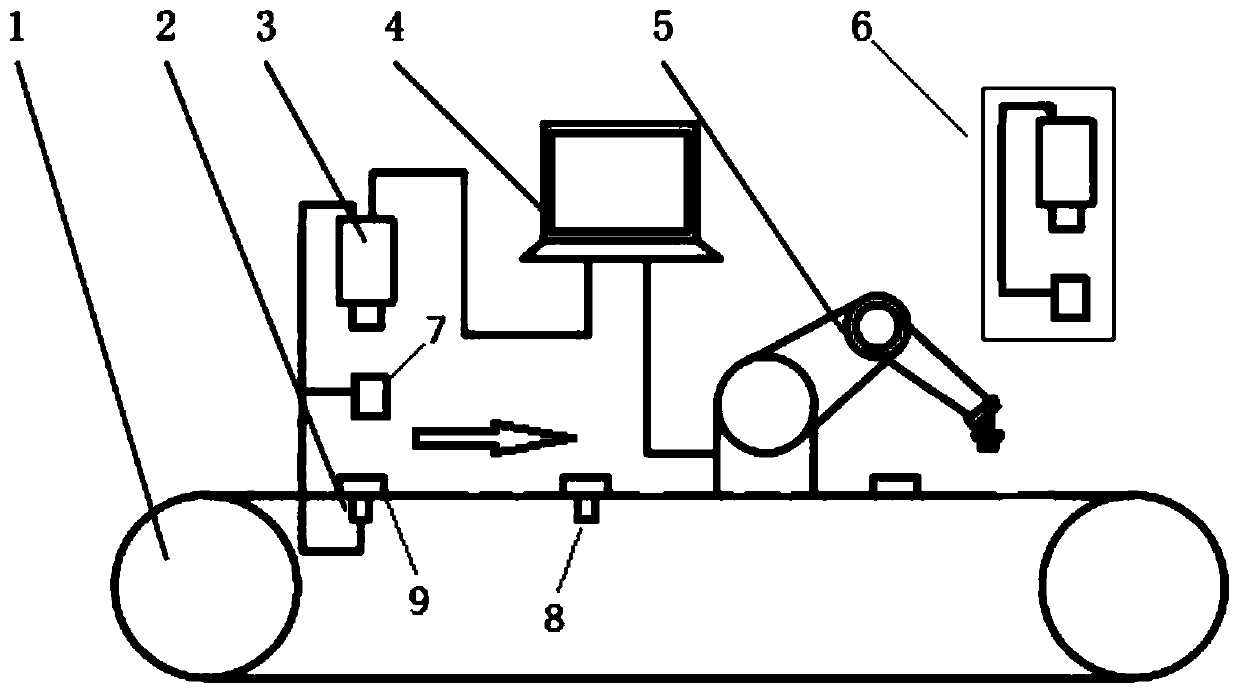
[0033] figure 1 The overall structure diagram of the robot dynamic tracking and grabbing system for vulnerable items provided in this embodiment, the robot dynamic tracking and grabbing system for vulnerable items includes a host computer 4, a robot 5, a robot controller, an end effector, PLC control system, conveyor belt 1, first photoelectric switch 2, second photoelectric switch 8, vulnerable items 9, CCD camera 3, image acquisition card and light source 7, etc. The remote vision system consists of a CCD camera 3 fixed at the beginning of the conveyor belt 1, an image acquisition card and a light source 7, and takes vertical shots of the vulnerable items 9 on the conveyor belt to obtain image information. The near-end vision system 6 is fixed directly in front of the robot 5, that is, takes pictures from the side directly in front to obtain image information of vulnerable item...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More