

An Unmanned Vehicle Obstacle Avoidance Method Based on the Combination of Gradient Descent Algorithm and Vo Method
A gradient descent algorithm and technology of unmanned boats, applied in two-dimensional position/channel control, navigation through speed/acceleration measurement, etc., can solve problems such as unstable navigation of unmanned boats, and achieve easy implementation and great flexibility The effect of nature and simple principle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
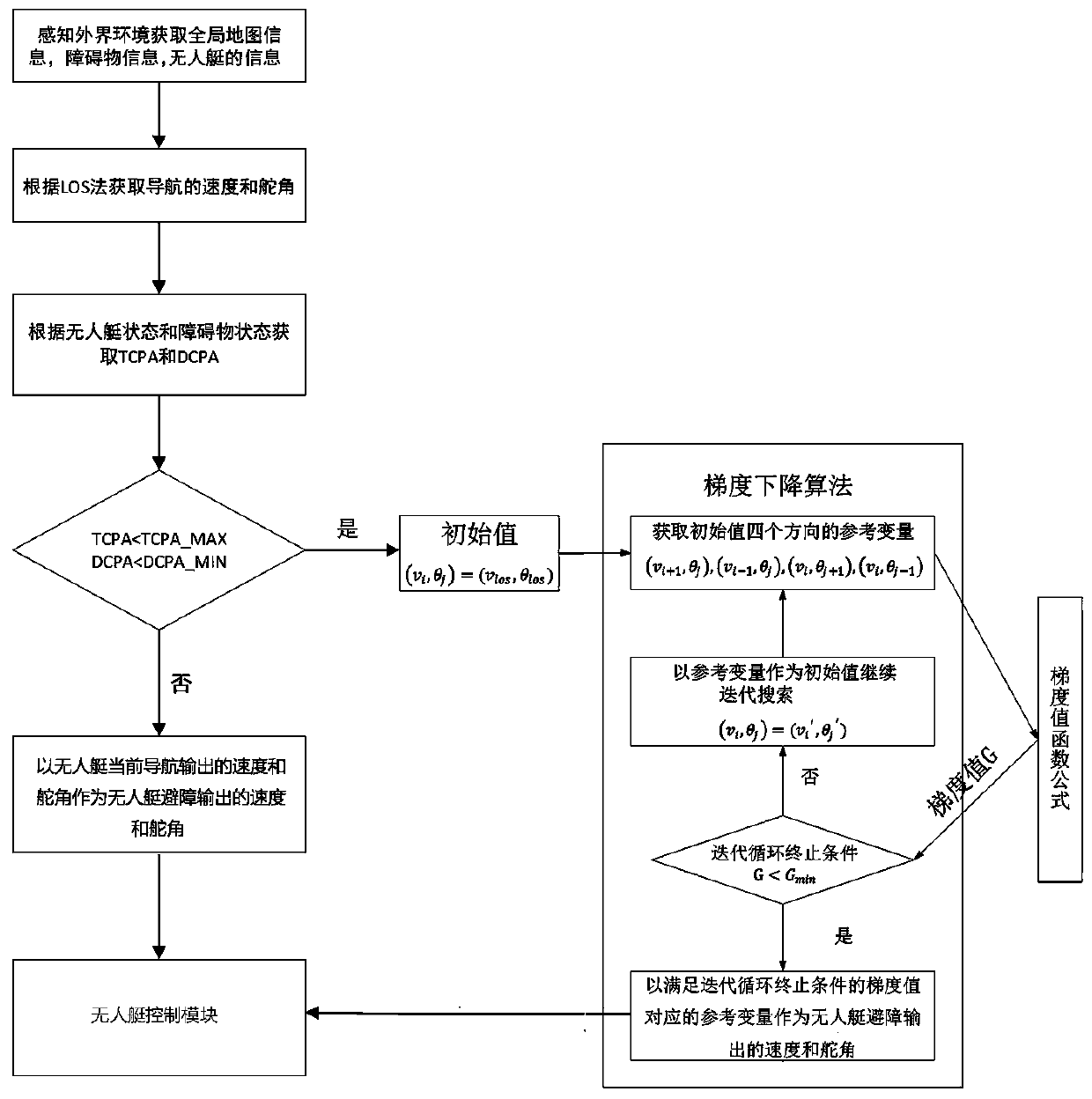
[0039] An unmanned vehicle obstacle avoidance method based on the combination of gradient descent algorithm and VO method, such as image 3 shown, including the following steps:
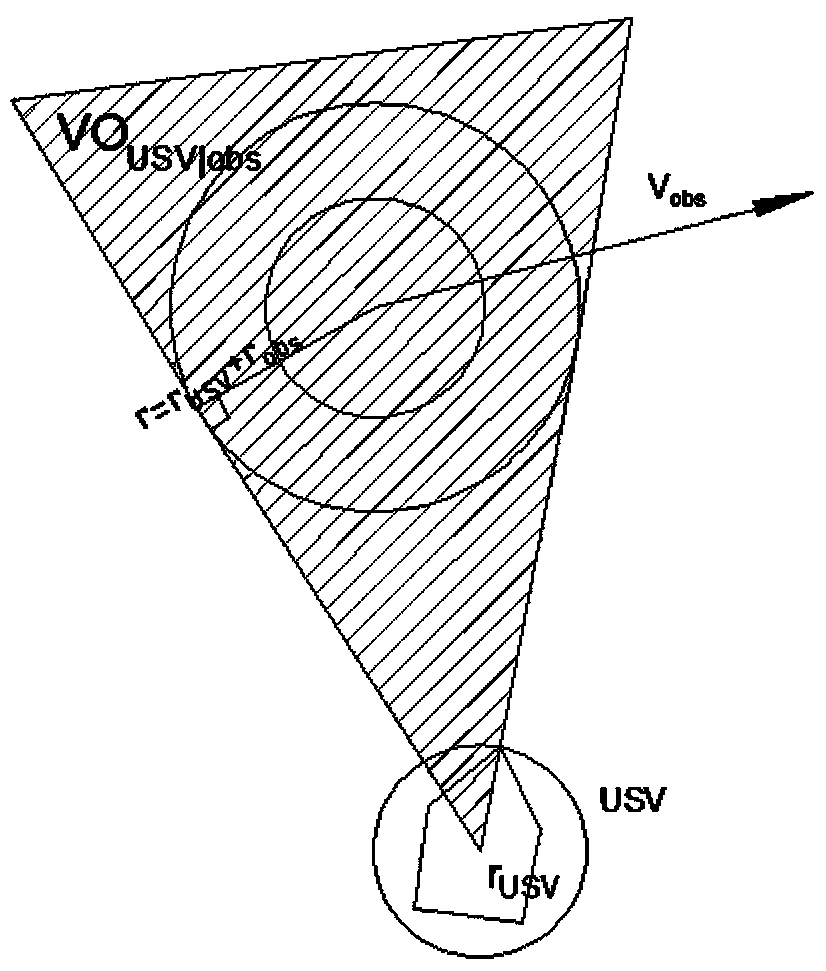
[0040] (1) Obtain the position, motion and attitude information of the unmanned boat through GPS and inertial navigation sensors; obtain environmental information through the radar, vision, laser radar, sonar and other sensors carried by the unmanned boat itself, and perform data fusion and environmental modeling to obtain Obstacle position, movement and size information, and according to the different sizes of obstacles, the obstacles are modeled as circular obstacles of different sizes; according to the LOS algorithm, the speed and rudder angle (v los ,θ los ).
[0041] (2) Determine whether there is a risk of collision between the unmanned boat and the obstacle. If there is no risk of collision between the unmanned boat and the obstacle, the speed and rudder angle output by the current navigatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More