

Robot navigation positioning system and method
A technology of navigation and positioning and robots, which is applied in the field of robot navigation and positioning systems, can solve problems such as imperfect path planning and obstacles, and achieve the effect of improving ease of use and ensuring smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments to further understand the purpose, solution and effect of the present invention, but it is not intended to limit the scope of protection of the appended claims of the present invention.
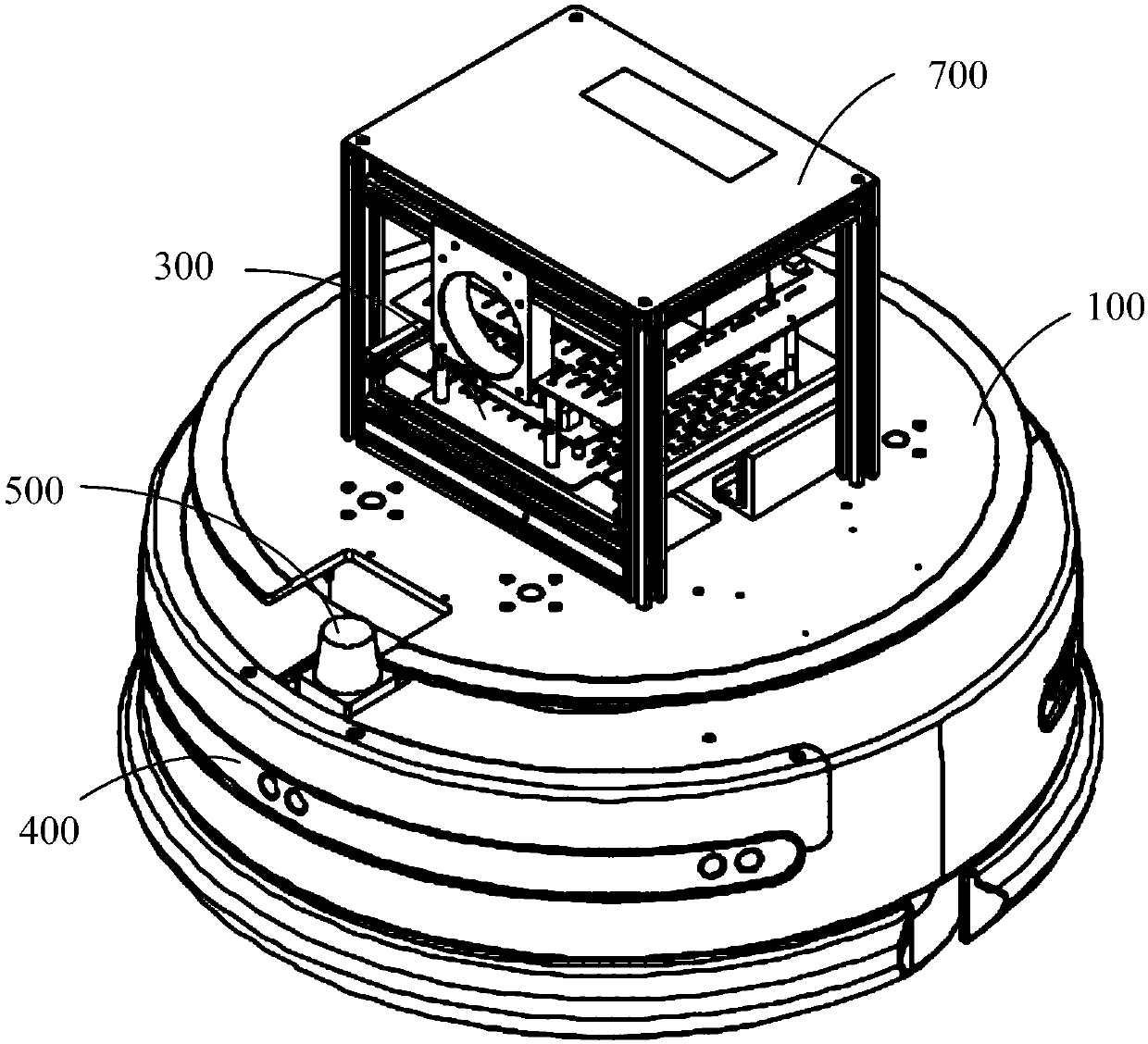
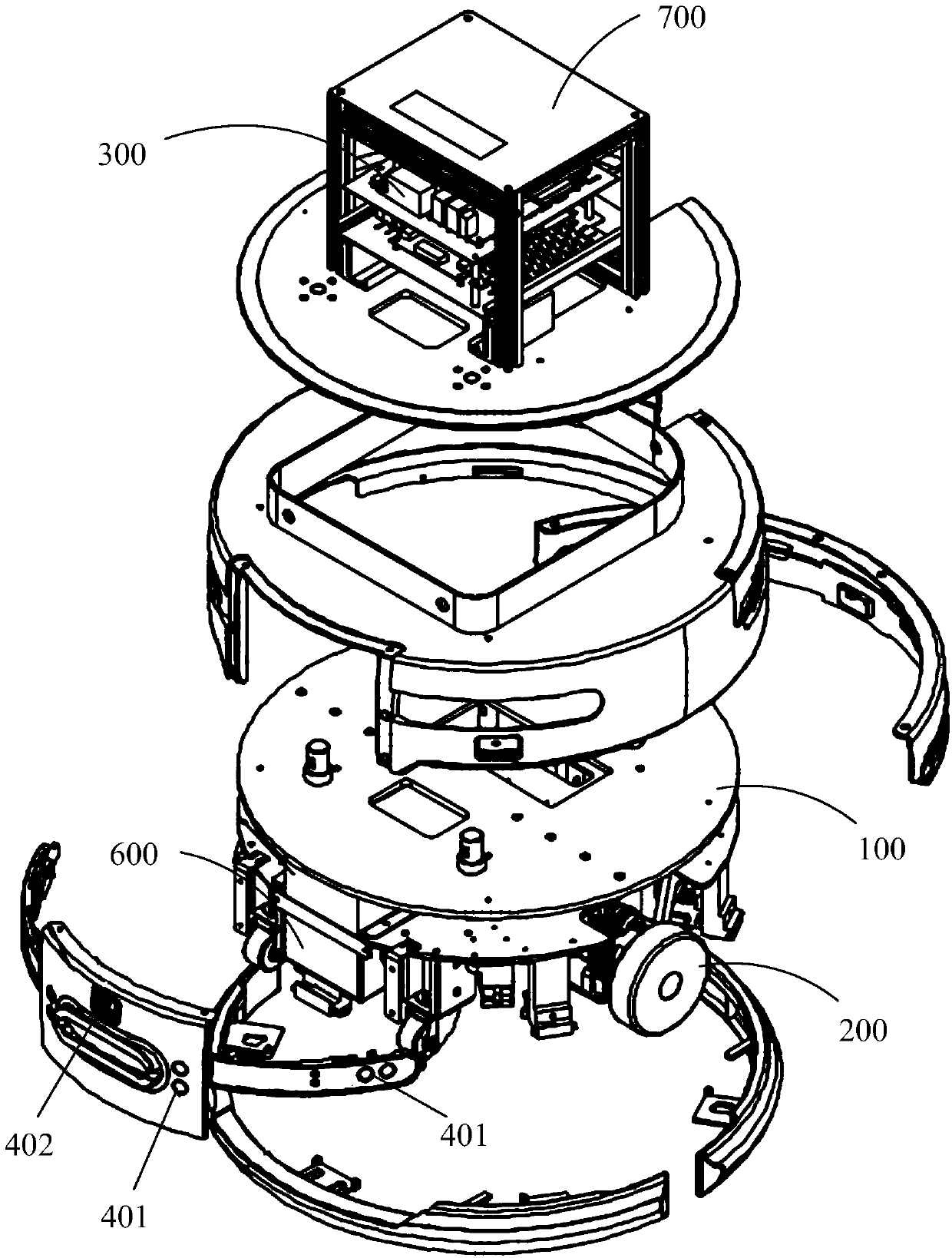
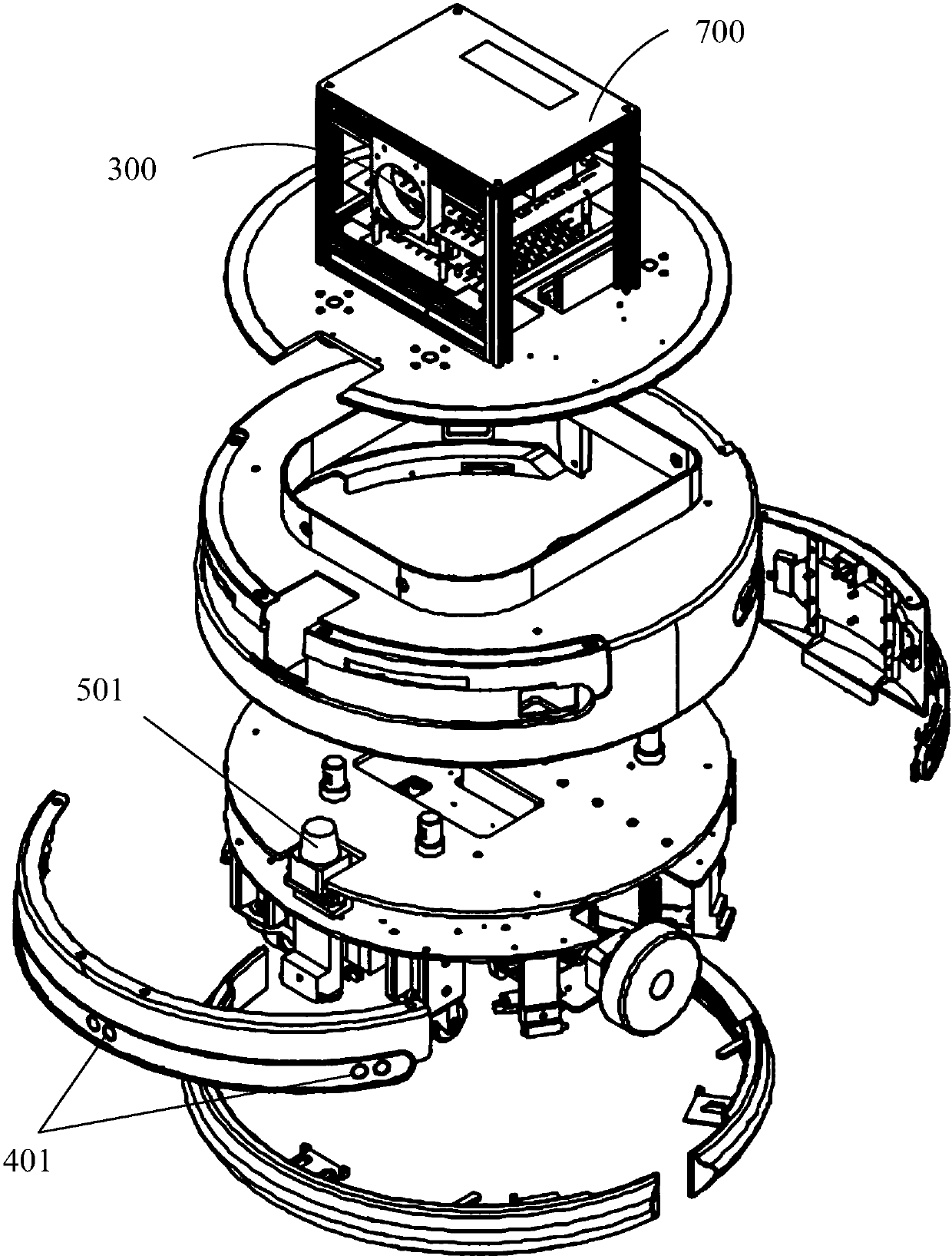
[0068] Such as figure 1 as well as Figure 2a , Figure 2b As shown, the robot 10 includes a fixed plate 100 , a traveling mechanism 200 , a drive control mechanism 300 , a collision detection mechanism 400 , a laser radar mechanism 500 , a battery mechanism 600 and an expansion mechanism 700 . It should be noted that the figure shows a robot mobile platform, which can be connected with various robot functional components through the expansion mechanism 700 to form, for example, an educational robot, a home robot, a welcoming and guiding robot, a food delivery robot, and the like.
[0069] The robot navigation and positioning system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More