

An automatic detection system and detection method for detonator defects
A technology for automatic detection and detonation, applied in the field of detection systems, can solve problems such as public safety hazards, limited algorithm versatility, and market entry, and achieve the effects of improving image acquisition accuracy, ensuring transmission stability, and improving specificity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
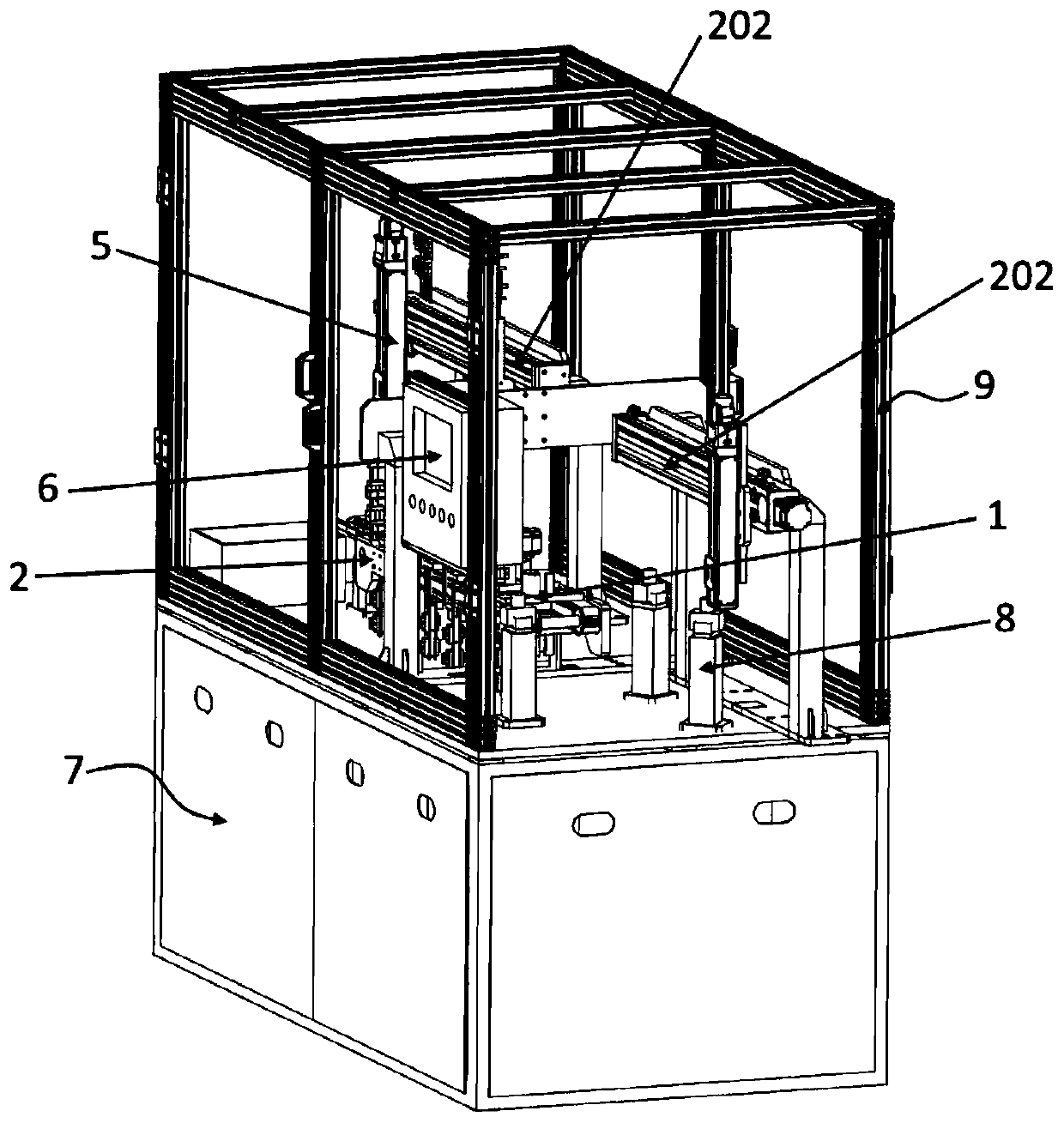
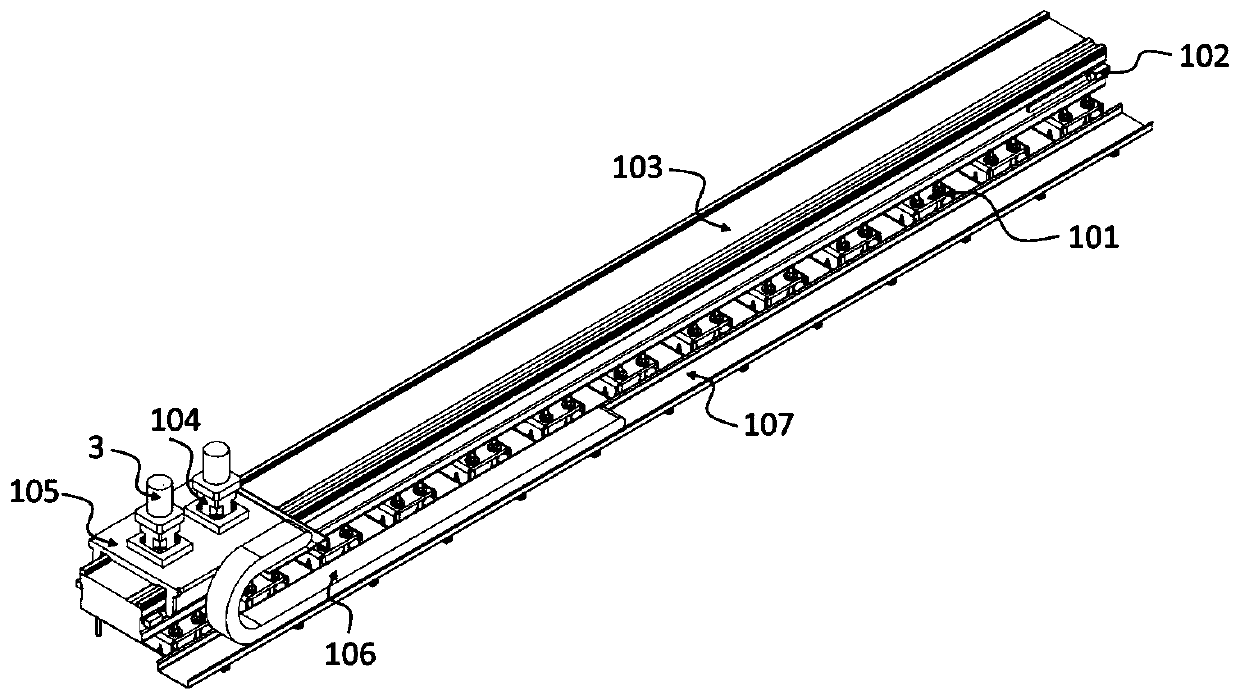
[0068] The overall structure of a detonator defect automatic detection system includes a stage, a plurality of cameras, and a computer. The stage includes a conveying path, a transmission block 105, and a positioning block 104. The stage is used to place samples to be tested. , which is the detonator in this article; the camera is used to collect image data, and transmit the image of the sample to be tested to the computer through a communication cable or wireless network, and finally the operator obtains information through the human-computer interface 6 on the computer.
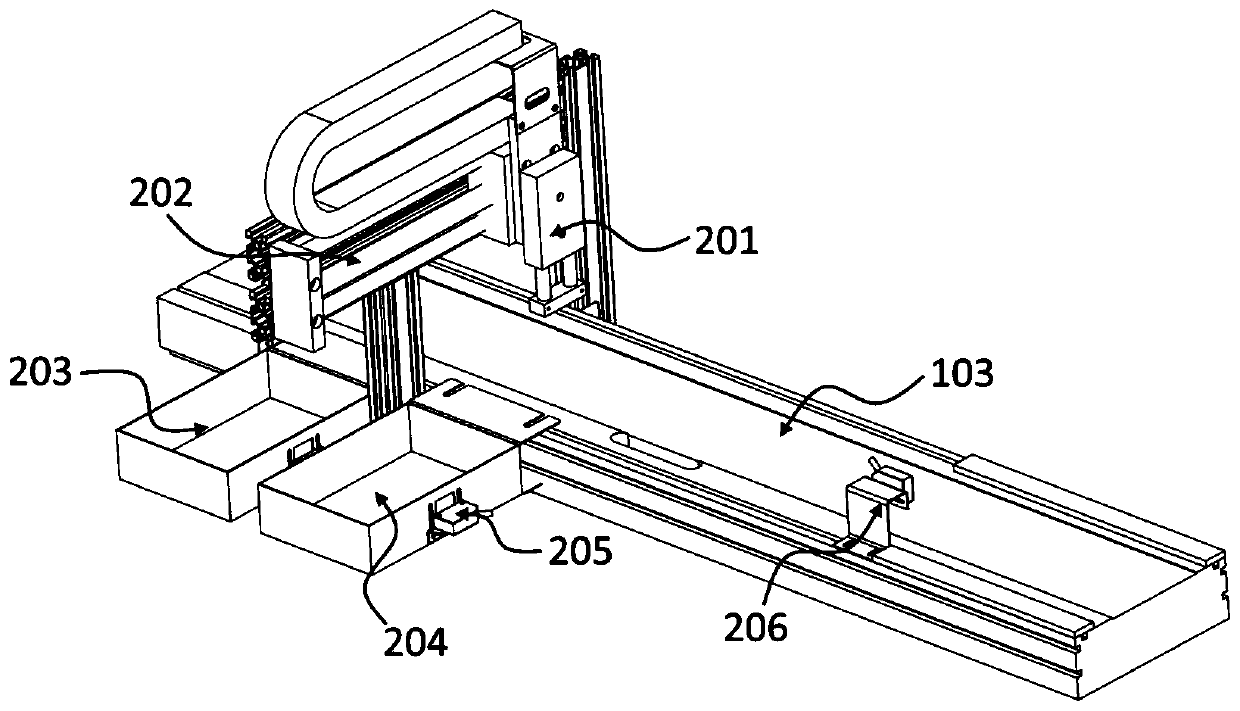
[0069] The mechanical movement module includes a frame 9 constructed of a plurality of profiles, a predetermined detection space is formed in the frame 9, and a conveying path is arranged in the frame 9 . The image acquisition module includes the design of the camera module of the system. For the shooting of the sample shape, considering the need to shoot the top surface of the sample, that is, the side surf...
Embodiment 2
[0073] On the basis of the first embodiment above, the image acquisition module can also include a six-axis robotic arm 4, the six-axis robotic arm 4 includes a rotary base 401, a big arm pitch joint rotatably connected to the rotary base 401 402, rotate the forearm pitch joint 403 connected to one end of the upper arm pitch joint 402, rotate the forearm rotary joint 404 connected to one end of the forearm pitch joint 403, and rotate the wrist pitch connected to one end of the forearm pitch joint 404 joint 405, and the wrist rotation joint 406 that is connected in rotation at one end of the wrist pitch joint 405; The rotary joints 406 are connected and driven by a servo motor 407, and the servo motor 407 has an absolute encoder built in; one end of the wrist pitch joint 405 is installed with a camera.
[0074]The specific working process of the six-axis mechanical arm 4 is as follows: the servo motor 407 located on the rotary base 401 drives the rotary base 401 to rotate, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More