

Sage-Husa adaptive unscented Kalman Filter attitude data fusion method
An unscented Kalman and adaptive filtering technology, applied in navigation computing tools and other directions, can solve the problems of noise statistical deviation, non-positive definite variance matrix, large filtering error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The following describes the embodiment of the present invention in detail, and this embodiment is exemplary, and is only used to explain the present invention, and should not be construed as limiting the present invention. A Sage-Husa adaptive unscented Kalman filter attitude data fusion method of the present invention will be described in detail below with reference to the accompanying drawings.
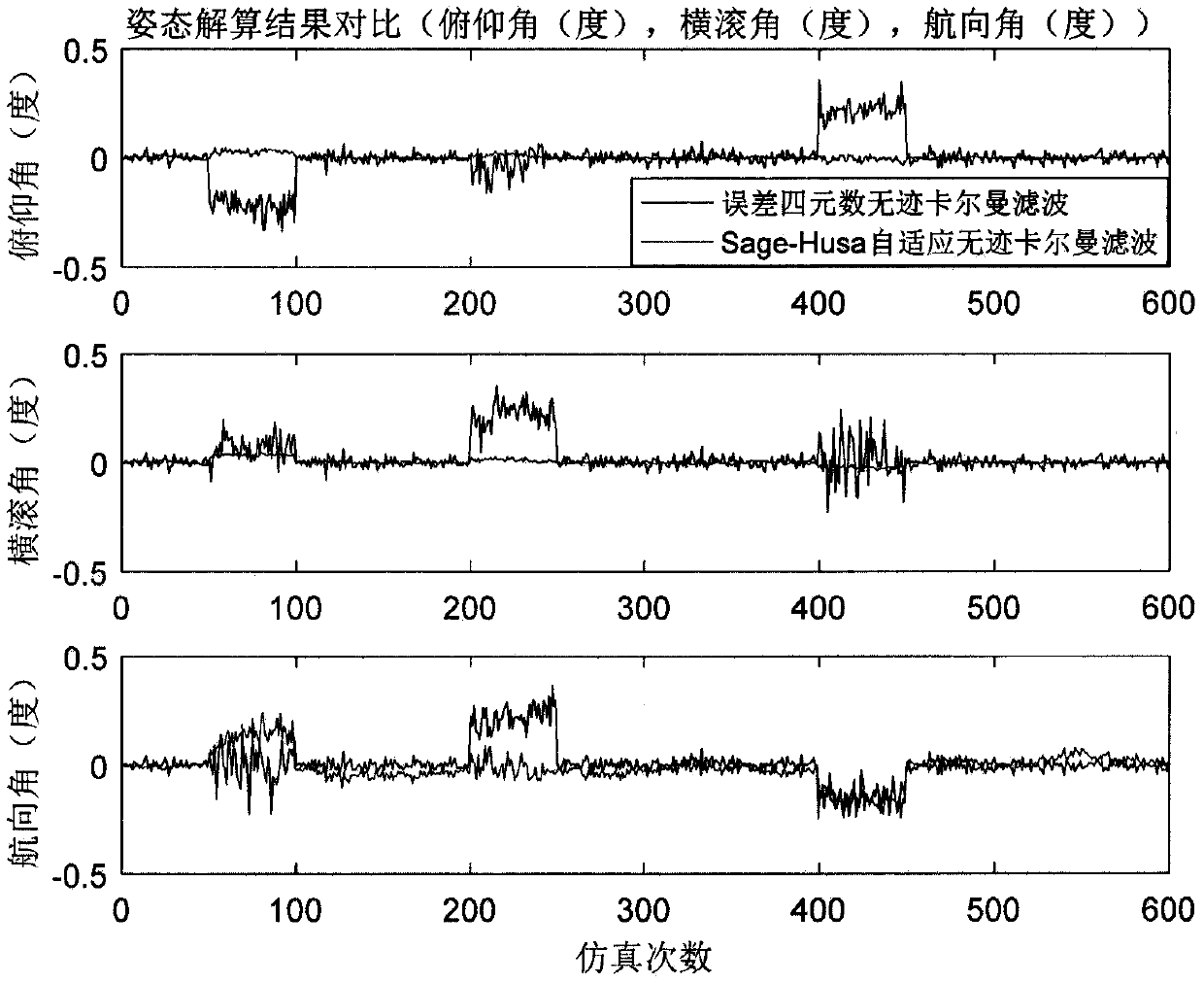
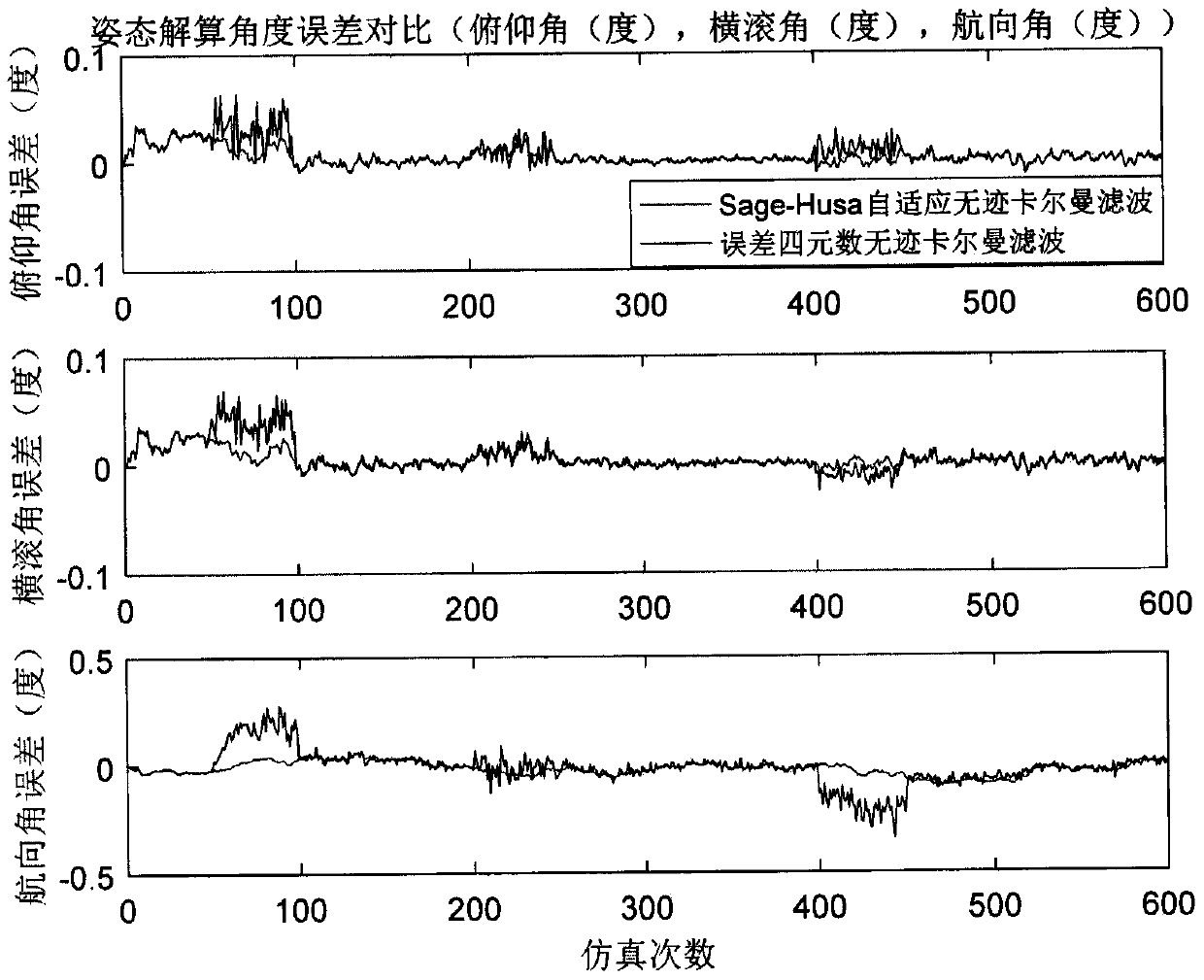
[0099] In order to better reflect the implementation and effect of the concrete steps of the present invention, the following simulation experiments are set up: use the MATLAB simulation platform to check the performance of the algorithm. In this experimental environment, the following measurement models can be built:
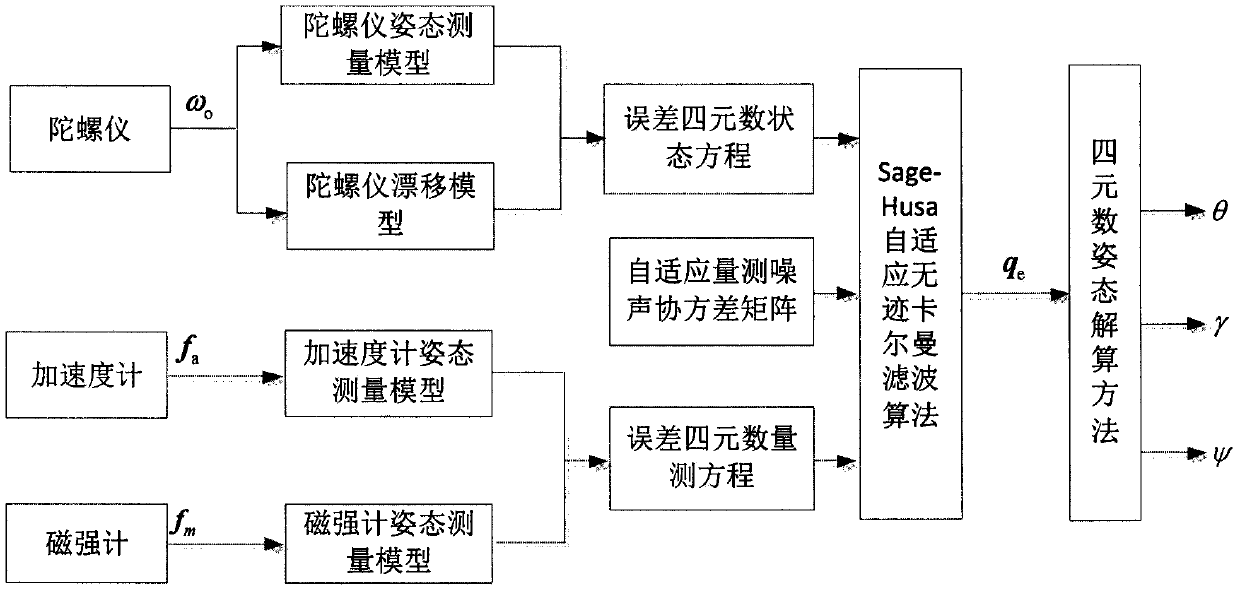
[0100] The gyroscope attitude measurement model and error model are where ω o and ω represent the angular velocity vector and the real angular velocity vector measured by the gyroscope in continuous time, respectively, n g and n εg represent zero-mean whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More