

RGB-D visual odometer based on GMS characteristic matching and sliding window pose graph optimization
A RGB-D, visual odometry technology, applied in the field of computer vision, can solve problems such as multi-computation, reduce system real-time performance, etc., to achieve the effect of improving robustness, high real-time performance, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
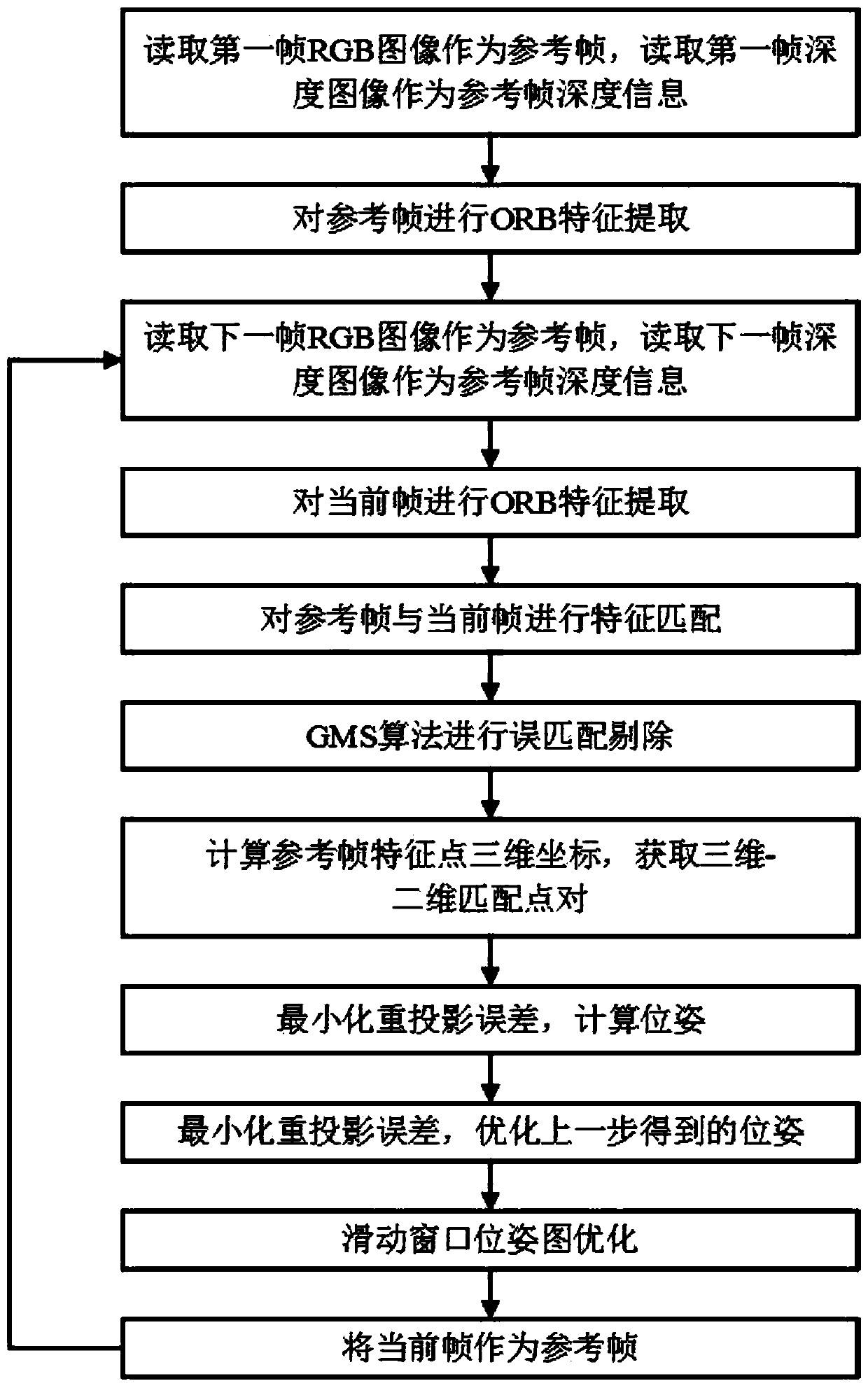
[0040] like figure 1 As shown, an RGB-D visual odometry based on GMS feature matching and sliding window pose graph optimization includes the following steps:
[0041] Step 1. Read and obtain the first frame of RGB image as a reference frame through the RGB-D camera, read the first frame of depth image as the depth information of the reference frame, extract feature points for the reference frame and calculate the ORB feature descriptor; the extracted features Point is the pixel position of the FAST (Fast Segment Test Feature) corner point in the image. The ORB feature compares the brightness value of the corner point with the brightness of the surrounding 128 pixels, and records it as 1 if it is brighter than the key point, and records it as 0 otherwise, and finally generates a 128-dimensional binary vector as the feature descriptor of the key point.
[0042] Step 2. Read the next frame of RGB image as the current frame, read the next frame of depth image as the depth inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More