Rehabilitation motion control method and system based on rehabilitation robot
A motion control system and rehabilitation robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of poor motion flexibility, insufficient smooth trajectory, incomplete synchronization of joint motion, etc., to restore motion function and reduce labor intensity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
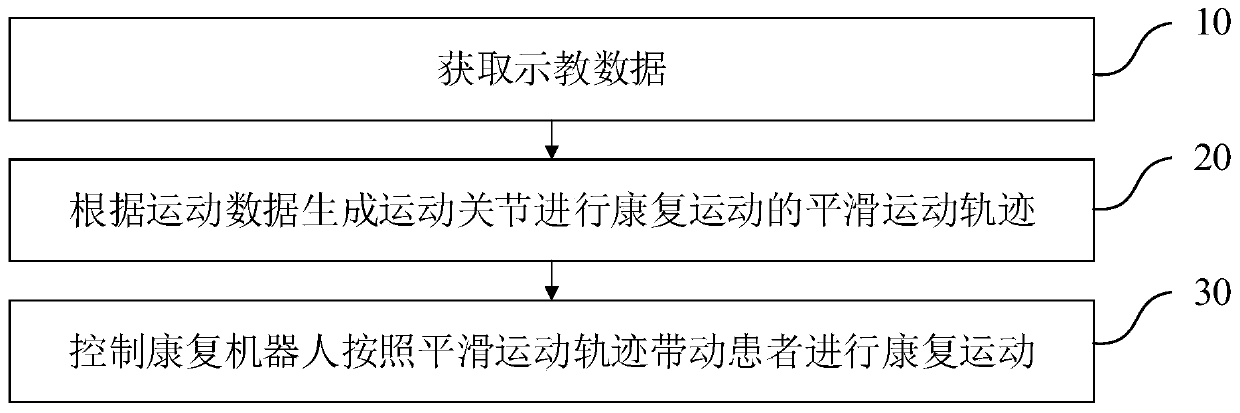
[0072] A rehabilitation motion control method based on a rehabilitation robot, such as figure 1 As shown, the rehabilitation exercise control method includes:
[0073] Step 10, acquiring teaching data; the teaching data includes the motion data of at least one motion joint when the patient is driven to perform the teaching motion;
[0074] Step 20, generating a smooth motion trajectory of the motion joint for rehabilitation exercise according to the motion data;
[0075] Step 30, controlling the rehabilitation robot to drive the patient to carry out rehabilitation exercise according to the smooth motion trajectory.
[0076] In this embodiment, the teaching training method is first used to allow the patient to perform passive rehabilitation training, for example: the therapist drives the patient to perform a complete teaching exercise, the rehabilitation robot records the teaching data, and performs trajectory processing based on the teaching data Finally, the smooth motion t...
Embodiment 2
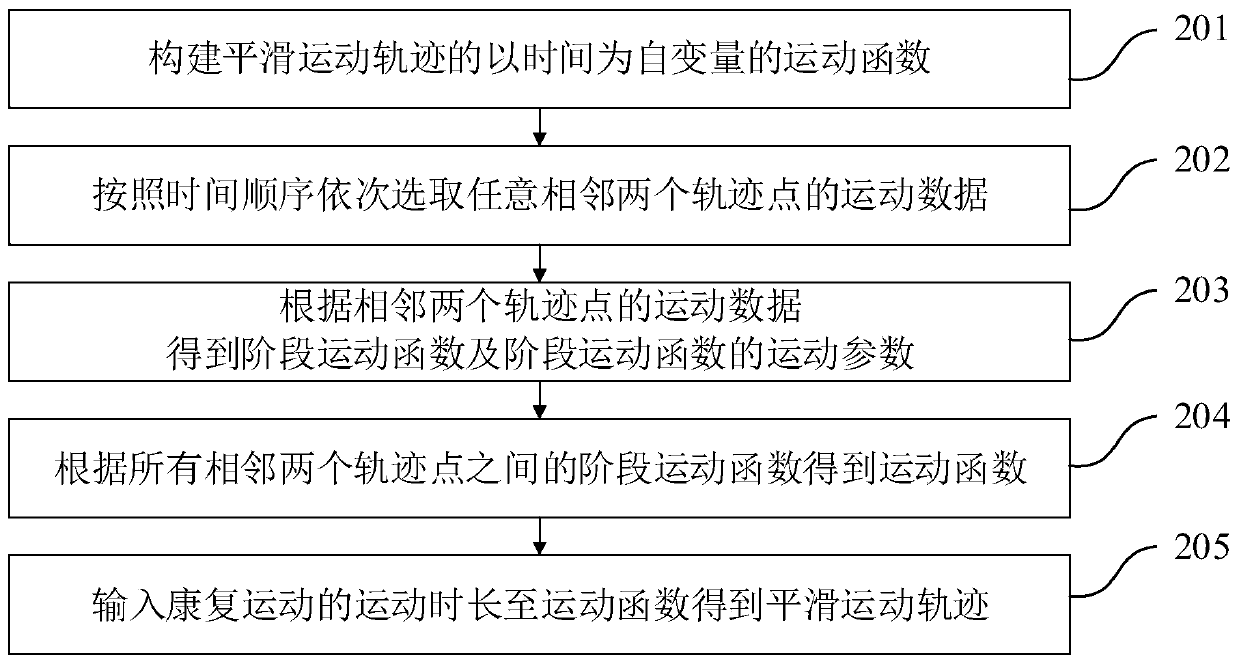
[0078] The rehabilitation motion control method based on the rehabilitation robot of this embodiment is further improved on the basis of Embodiment 1, the motion data includes motion data of the motion joint at multiple trajectory points, and the motion data includes motion duration, position , velocity and acceleration, such as figure 2 As shown, step 20 specifically includes:
[0079] Step 201, constructing a motion function with time as an independent variable of a smooth motion trajectory; the motion function includes a position motion function, a velocity motion function and an acceleration motion function;
[0080] Step 202, sequentially selecting the motion data of any two adjacent trajectory points in chronological order;
[0081] Step 203, obtaining the phase motion function and the motion parameters of the phase motion function according to the motion data of two adjacent trajectory points;
[0082] Step 204, obtaining a motion function according to the phase moti...
Embodiment 3
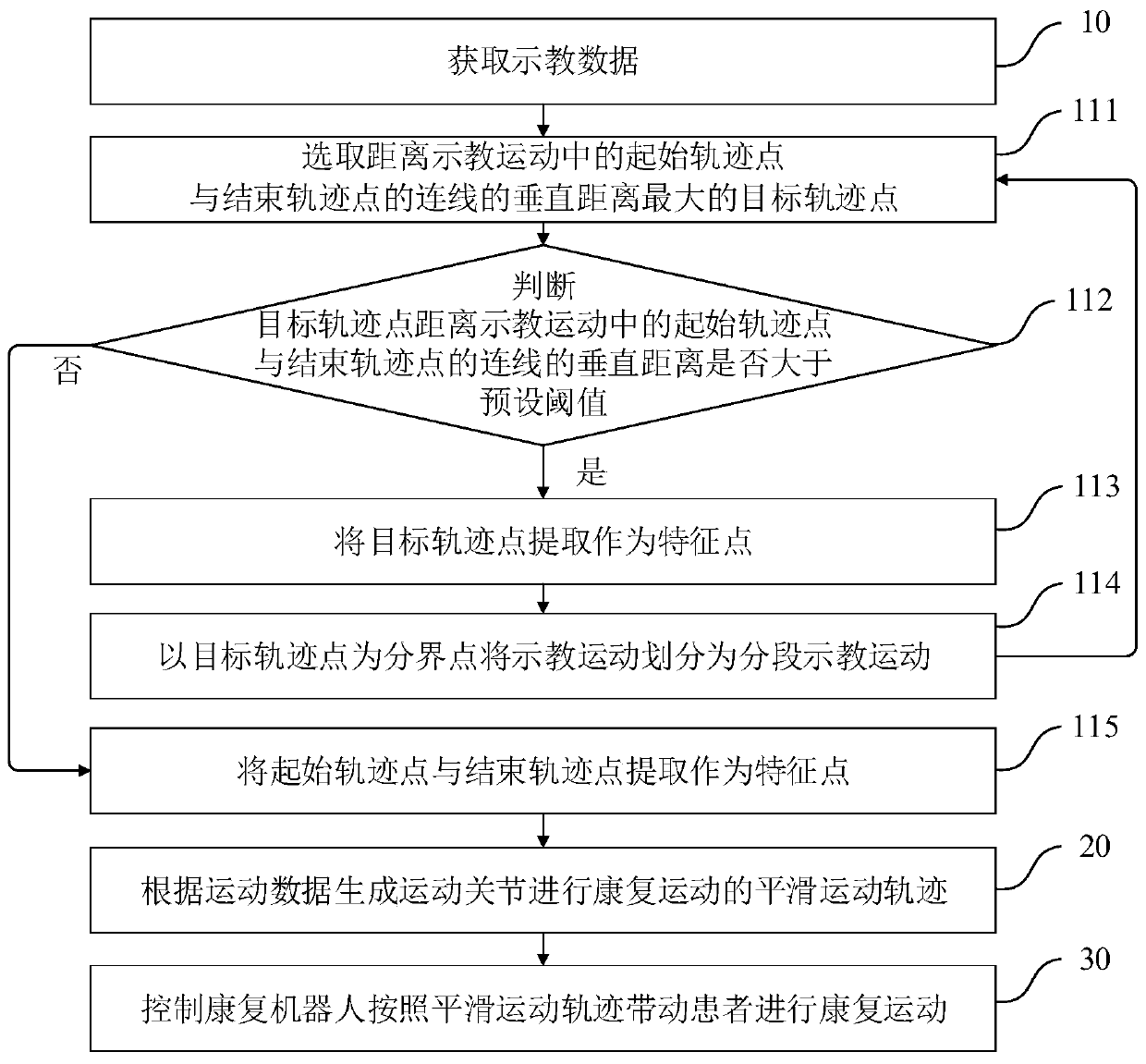
[0131] The rehabilitation motion control method based on the rehabilitation robot of this embodiment is further improved on the basis of Embodiment 2, as image 3 As shown, before step 20, the rehabilitation exercise control method also includes:
[0132] Step 111, selecting the target track point with the largest vertical distance from the line connecting the start track point and the end track point in the teaching movement;
[0133] Step 112, judging whether the vertical distance between the target track point and the line connecting the start track point and the end track point in the teaching movement is greater than the preset threshold, if yes, then perform step 113, if not, then perform step 115;
[0134] Step 113, extracting target trajectory points as feature points;
[0135] Step 114, dividing the teaching movement into segmented teaching movements with the target trajectory point as the dividing point, returning to step 111, and performing the action of selecting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More