

Unmanned vehicle path tracking control device and method based on multipoint tracking
An unmanned vehicle and path tracking technology, which is applied in the field of unmanned vehicle path tracking control device and control, can solve the problems of insufficient tracking accuracy, inability to fully consider simultaneous joint influence, dynamic adjustment, etc., to achieve certainty Reasonable, adaptable, comprehensive information effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with embodiment, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art can modify various equivalent forms of the present invention All fall within the scope defined by the appended claims of this application.
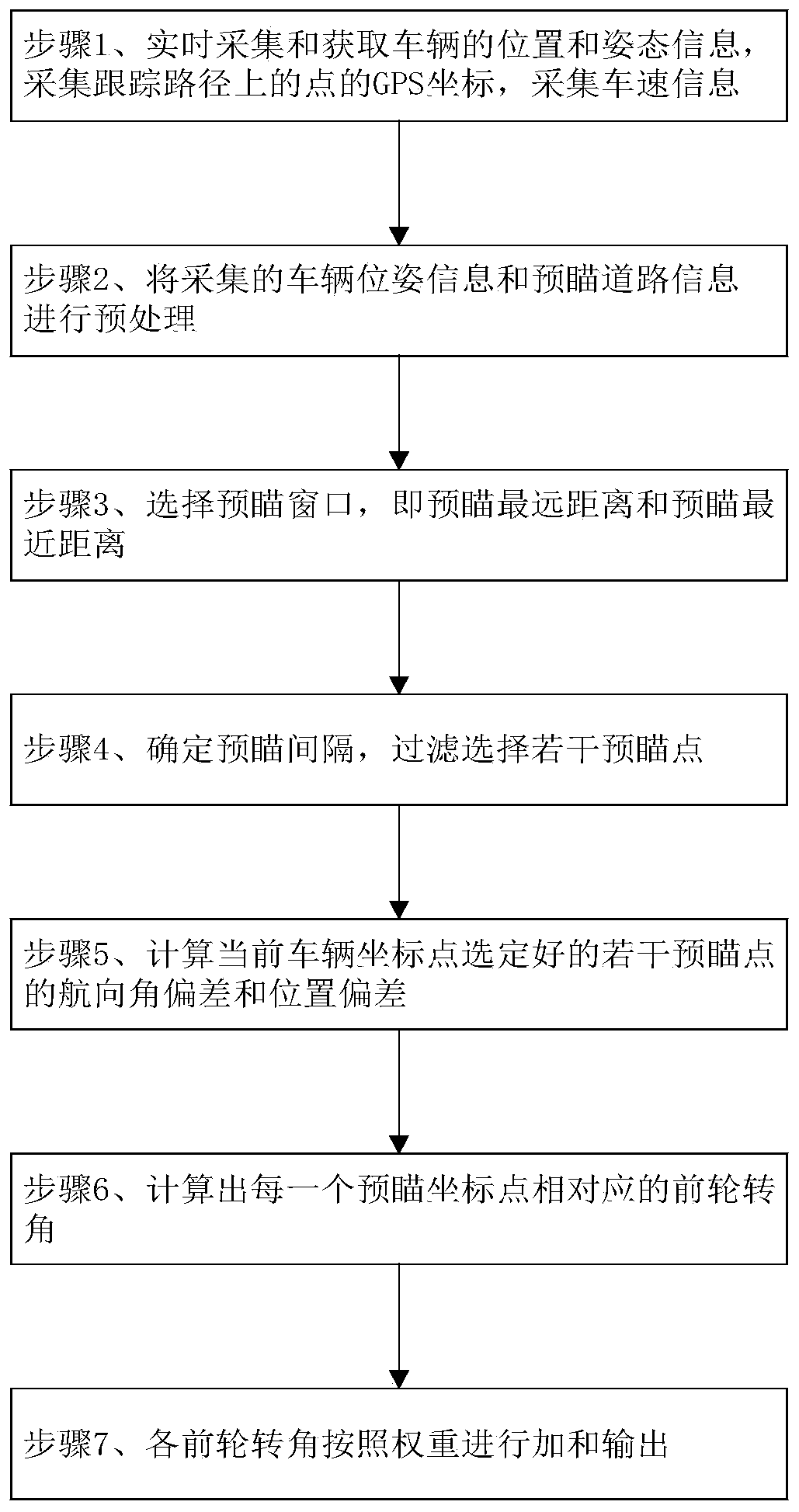
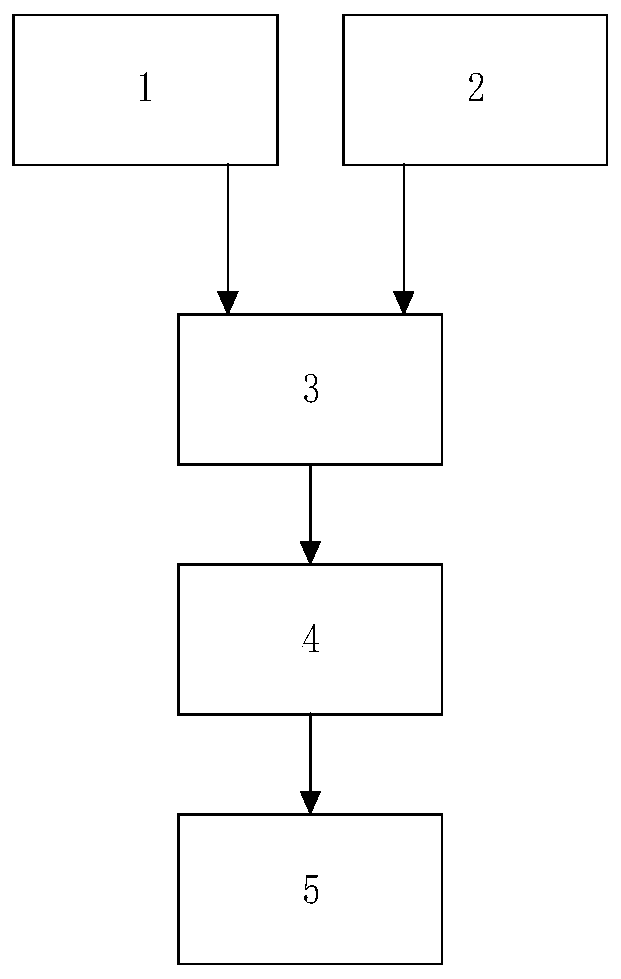
[0051] like figure 1 and figure 2 As shown, the path tracking control device for unmanned vehicles based on multi-point tracking is composed of GPS data acquisition module 1, vehicle speed acquisition module 2, data preprocessing module 3, calculation module 4 and wire control execution system 5. The GPS data acquisition module 1 and the vehicle speed acquisition module 2 provide raw data for the data preprocessing module 3, and the data preprocessing module 3 transmits the processed information to the calculation module 4,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More