

Multi-UAV cooperative patrol inspection method and system suitable for regional transmission line
A transmission line and multi-drone technology, applied in the direction of overhead lines/cable equipment, etc., can solve the problems of high pressure on operators, high requirements for operators, missing inspection sites, etc., and achieve the effect of saving investment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
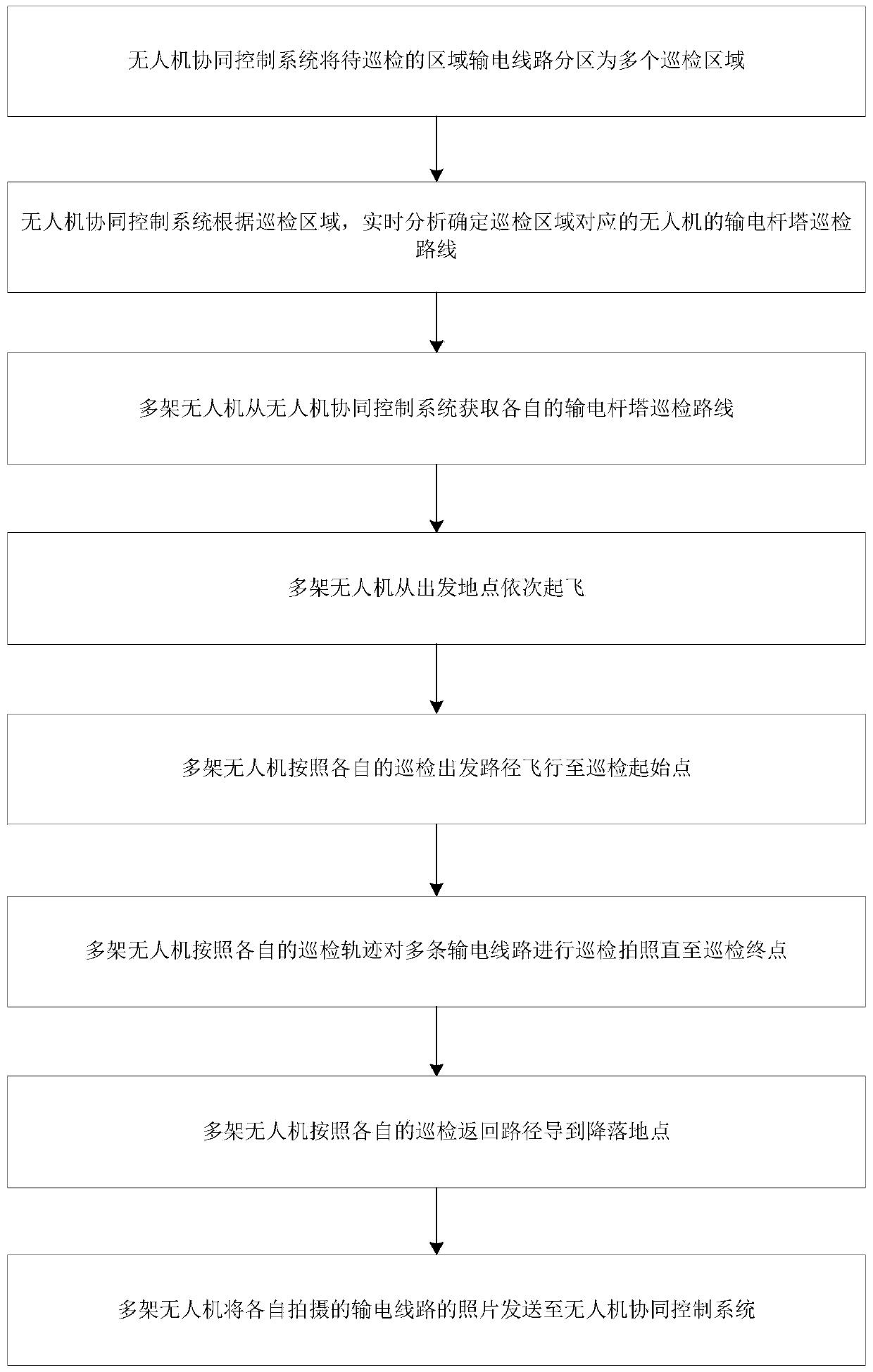
[0031] Combine figure 1 , The present invention mentions a multi-drone cooperative inspection method suitable for regional transmission lines, the method includes:
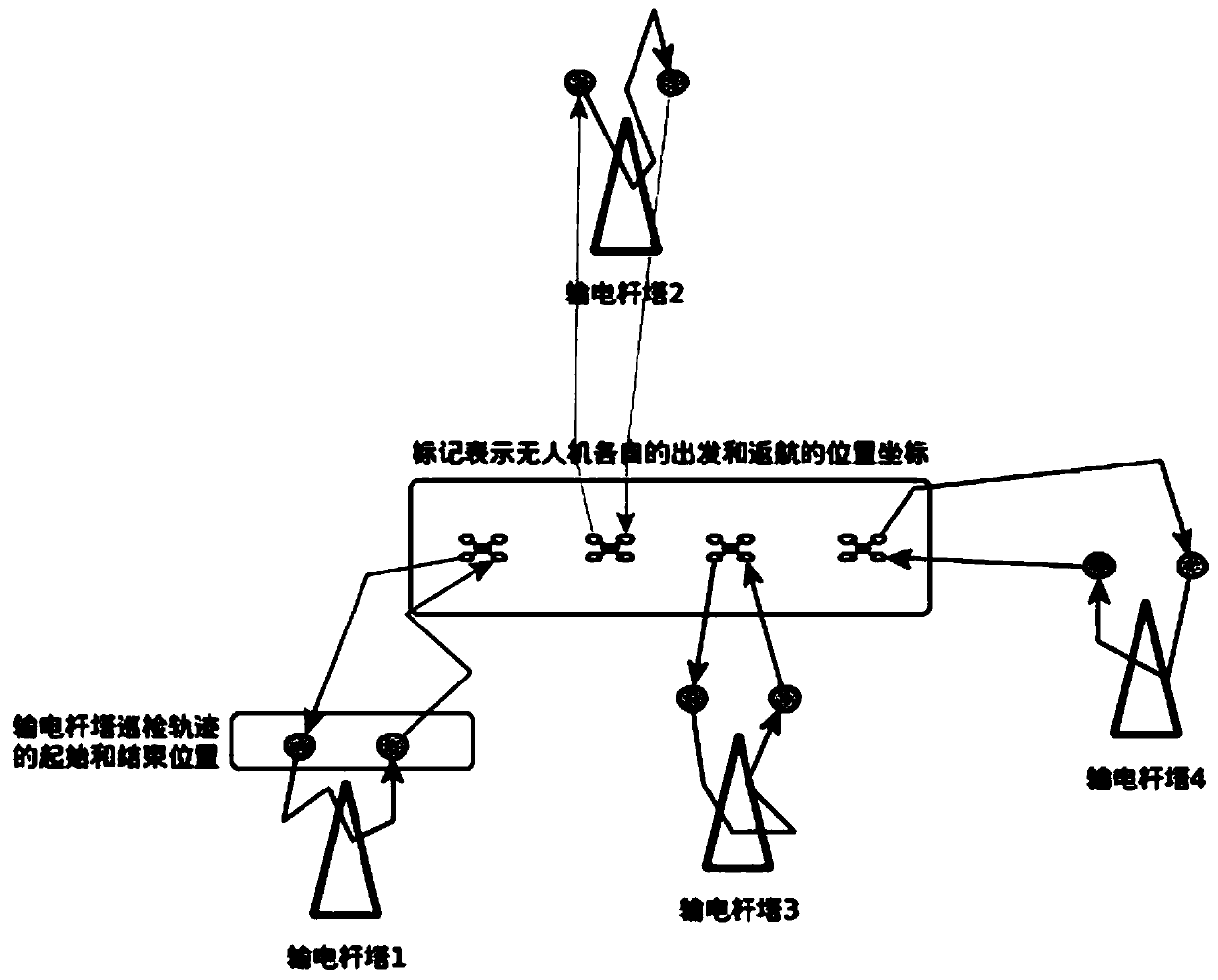
[0032] S1: Obtain inspection tasks. The inspection tasks include the regional transmission lines to be inspected. The inspection tasks are analyzed and the regional transmission lines to be inspected are divided into several inspection areas. Each inspection area is assigned one Drone.
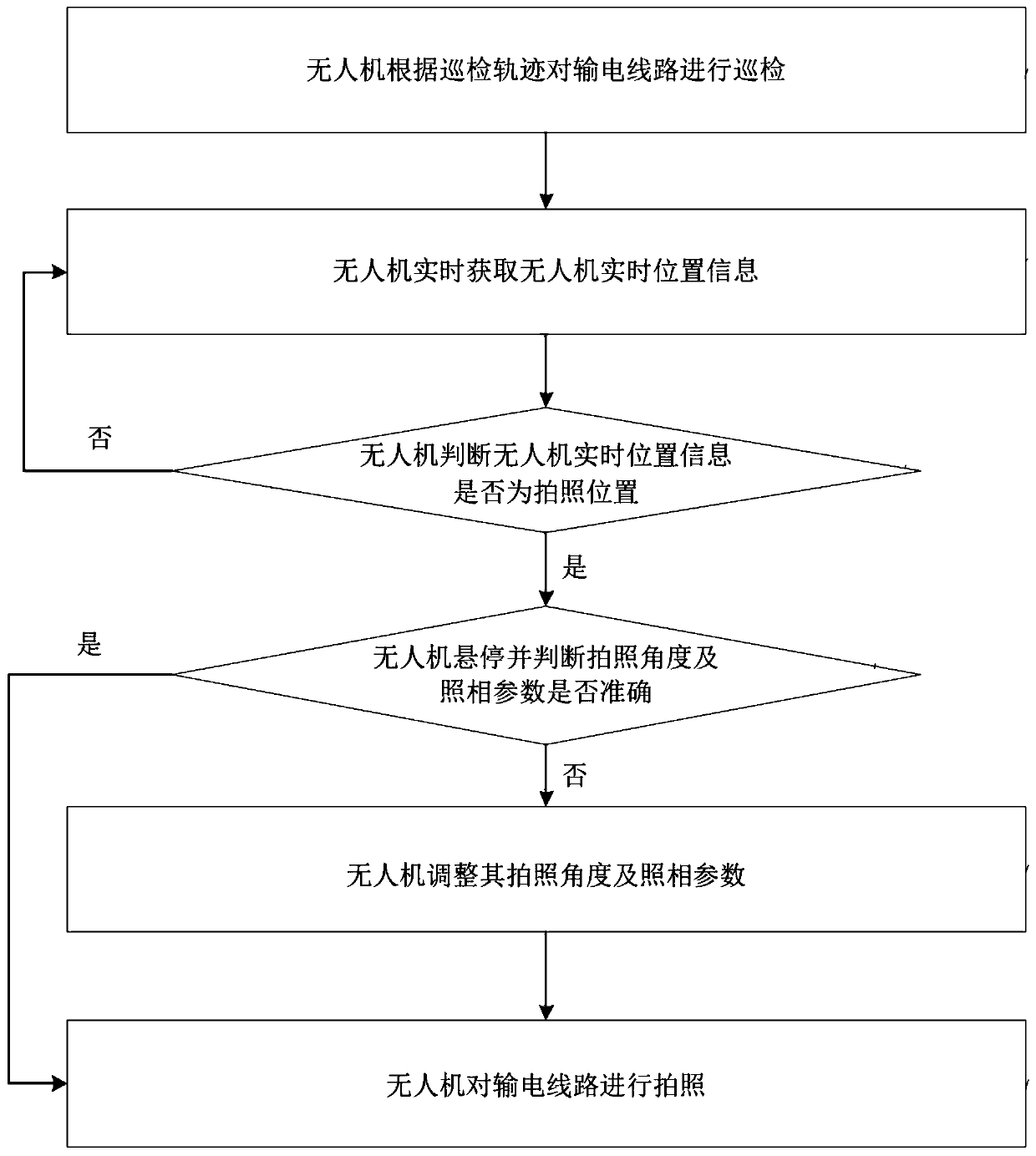
[0033] S2: For each inspection area, combine the coordinate information and altitude of the transmission line in each inspection area to generate several inspection routes that do not interfere with each other, and import the generated inspection routes into the UAV one by one. The inspection route includes the inspection departure path, the inspection trajectory, and the inspection return path.
[0034] Preferably, the inspection trajectory is generated by pre-flight recording by an unmanned aerial vehicle and / or measurement and calcul...
specific Embodiment 2
[0085] Based on the aforementioned method, the present invention also mentions a multi-UAV cooperative inspection system suitable for regional power transmission lines. The system includes several drones, a drone coordinated control system, and a communication device. The aircraft cooperative control system conducts data interaction with the UAV through the communication device.
[0086] The UAV collaborative control system includes the following modules:
[0087] 1) It is used to receive inspection tasks, analyze the inspection tasks, and divide the regional transmission lines to be inspected into several inspection areas, and each inspection area is assigned a UAV module.
[0088] 2) For each inspection area, combined with the coordinate information and altitude of the transmission line of each inspection area, generate several inspection routes that do not interfere with each other, and import the generated inspection routes one by one The man-machine module, the inspection route...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More