

Coordinated attitude control method of multi-space vehicle under input delay
A collaborative control and aircraft technology, applied in the direction of attitude control, control/regulation system, non-electric variable control, etc., can solve the problems of weak robustness and poor system performance, and achieve strong robustness, good performance, and fast attitude Effect of Angular Synchronization Convergence Speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
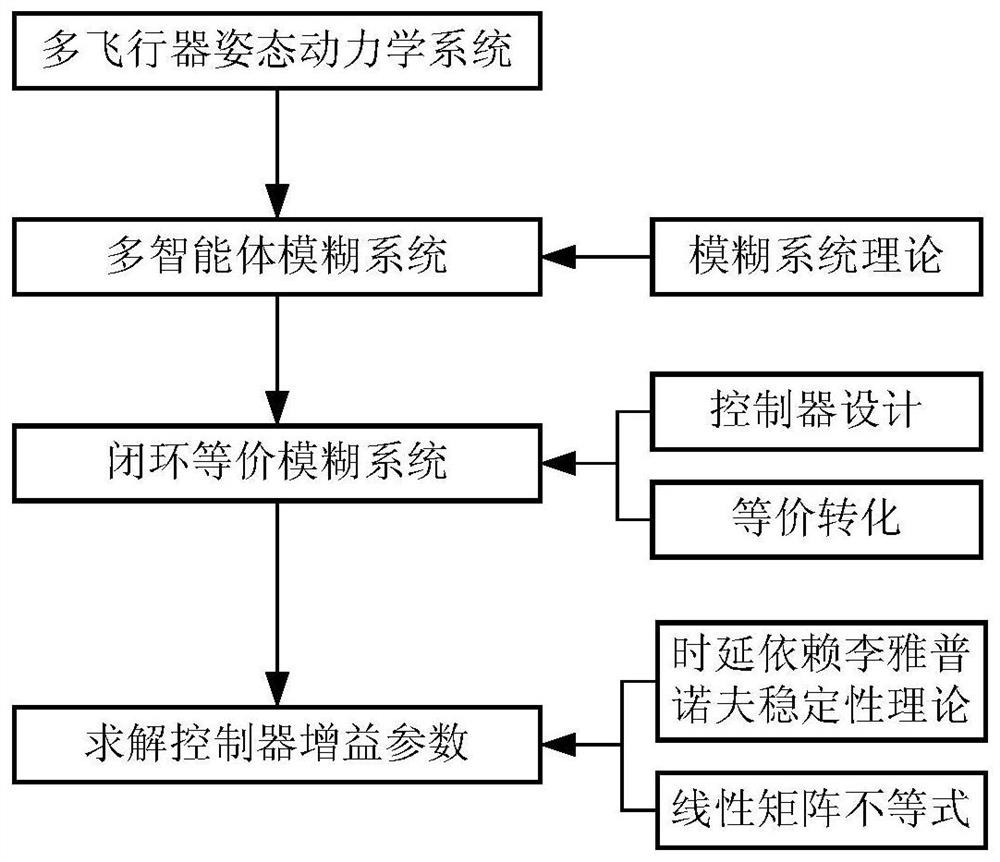
[0061] refer to Figure 1-6 . The specific steps of the multi-space vehicle attitude cooperative control method under the input delay of the present invention are as follows:
[0062] Step 1. Use fuzzy theory to construct the multi-aircraft attitude dynamics system as a fuzzy system composed of a series of fuzzy logics. Firstly, the following multi-aircraft attitude dynamics model is given:
[0063]
[0064] In the formula, J i represents the inertia matrix; q i (t) and q i0 (t) represent the vector and scalar parts of the pose quaternion, respectively; ω i (t) represents the attitude angular velocity; u i (t) represents the control input acting on the aircraft; τ(t) represents the input delay variable, and there are 0≤τ(t)≤τ and where τ and ρ are positive constants. In addition, equation (1) can also be transformed into the form of the following state space equation:
[0065]
[0066] In the formula,
[0067]
[0068] In order to facilitate the constructio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More