

Structured light depth camera self-correction method and device for smart phone
A technology for smart phones and depth cameras, which is applied in the fields of depth perception, smart cameras, and smart phones. It can solve the problems of decreased depth accuracy and increased noise, and achieve the effect of improving robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
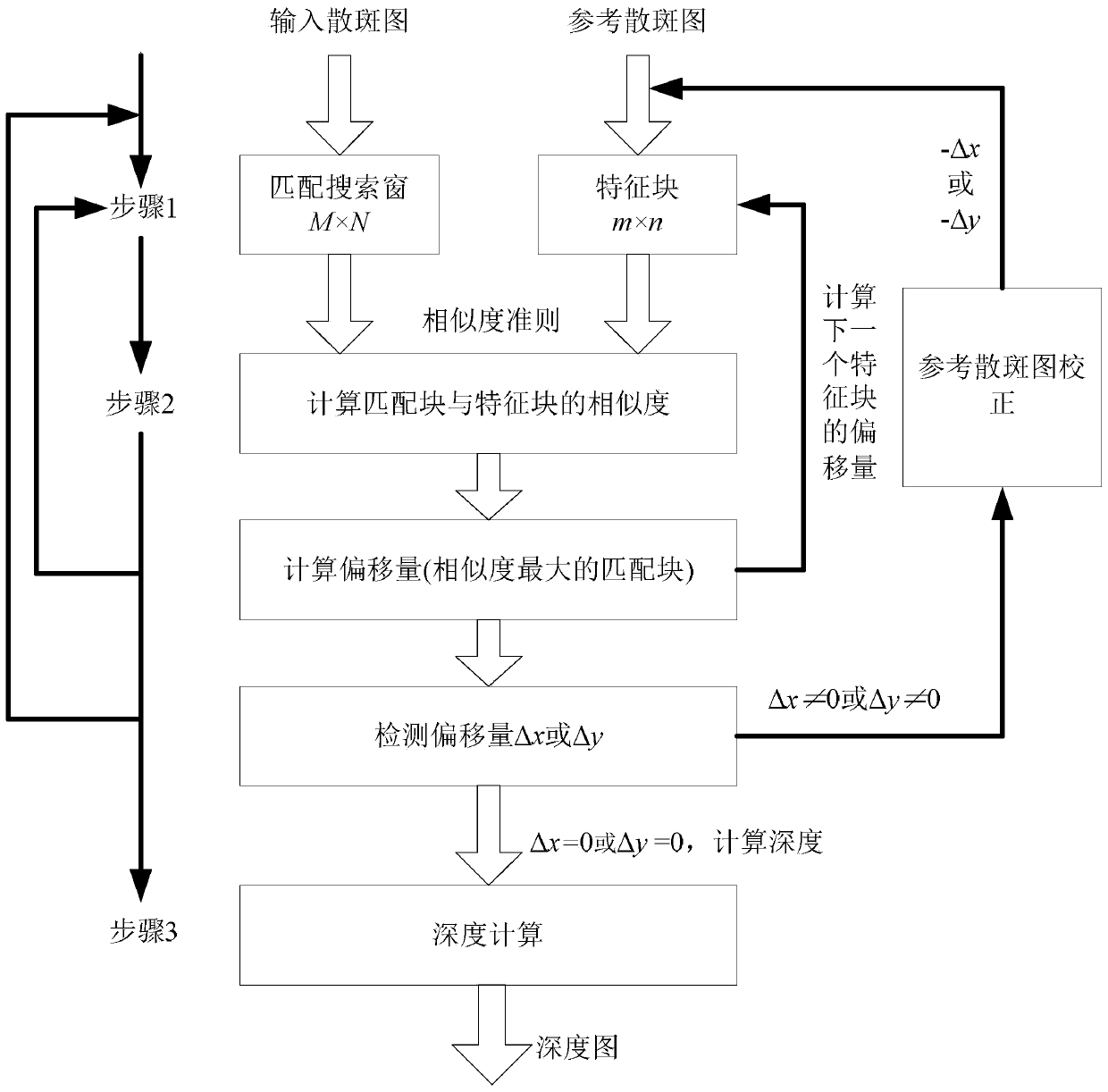
[0035] Attached below Figure 1-7 The self-calibration method and device of the present invention will be further described in detail.
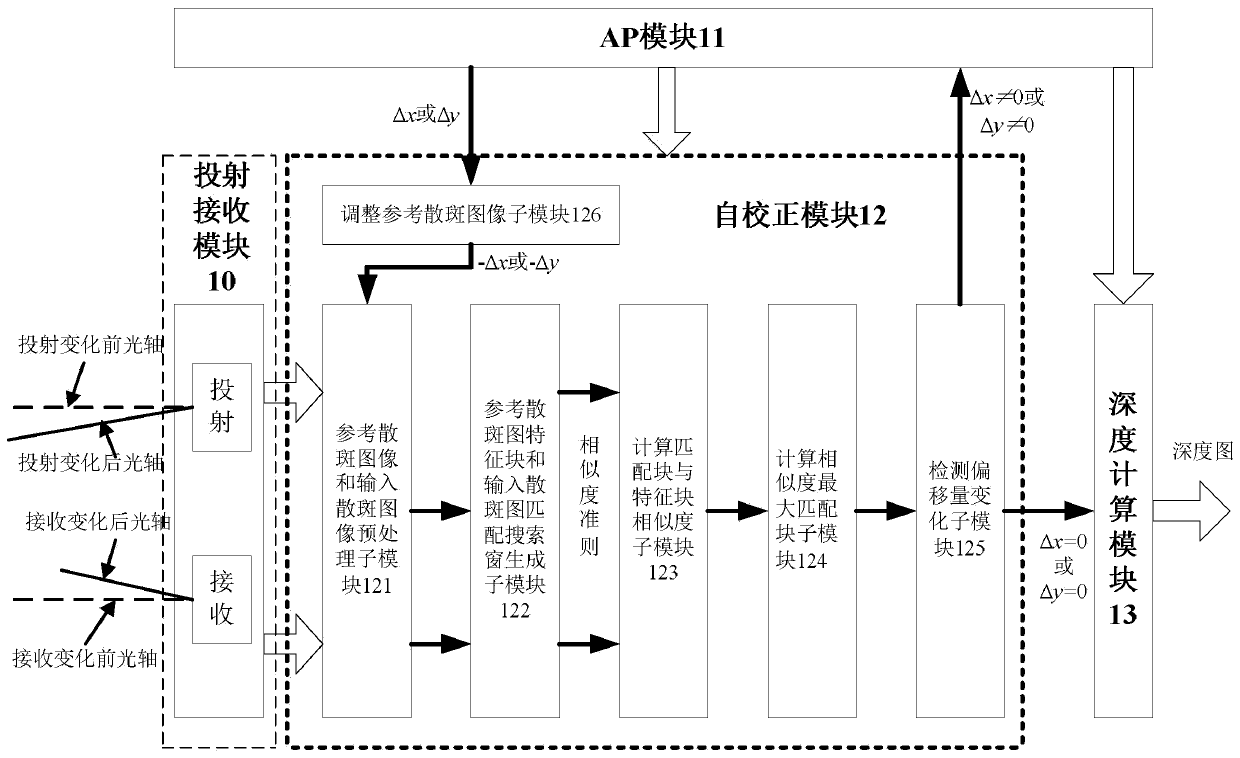
[0036] figure 1 It is a structural frame diagram of a structured light depth camera self-calibration device for a smart phone according to an embodiment of the present invention. Such as figure 1 As shown, the self-calibration device includes a projection receiving module 10 , an AP module 11 , a self-calibration module 12 and a depth calculation module 13 .
[0037] The projecting and receiving module 10 is configured to receive an input speckle image for depth calculation projected from an infrared laser speckle projector and collected by an image receiving sensor, and a reference speckle image.
[0038]The speckle image projected by the infrared laser speckle projector can be composed of a vertical cavity surface laser transmitter VCSEL combined with a collimating mirror and a diffractive optical device DOE, or a semiconductor laser LD ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More