

Miniature high-torque high-speed joint integrated hydraulic driver
A hydraulic drive, high torque technology, applied in the field of robots, can solve the problems of low inertia, high load high frequency response, high power density, etc., and achieve the effect of improving power density ratio, increasing life, and reducing inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
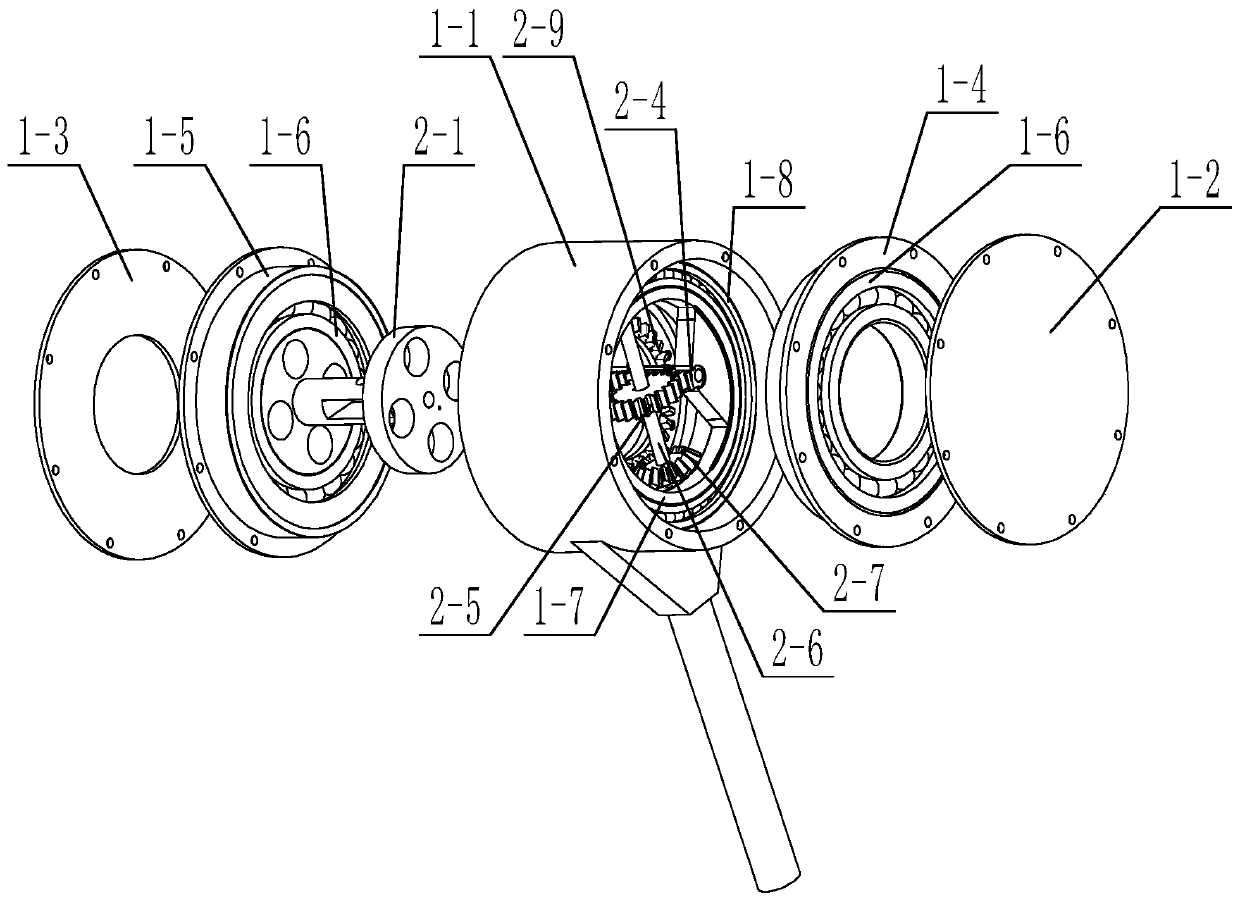
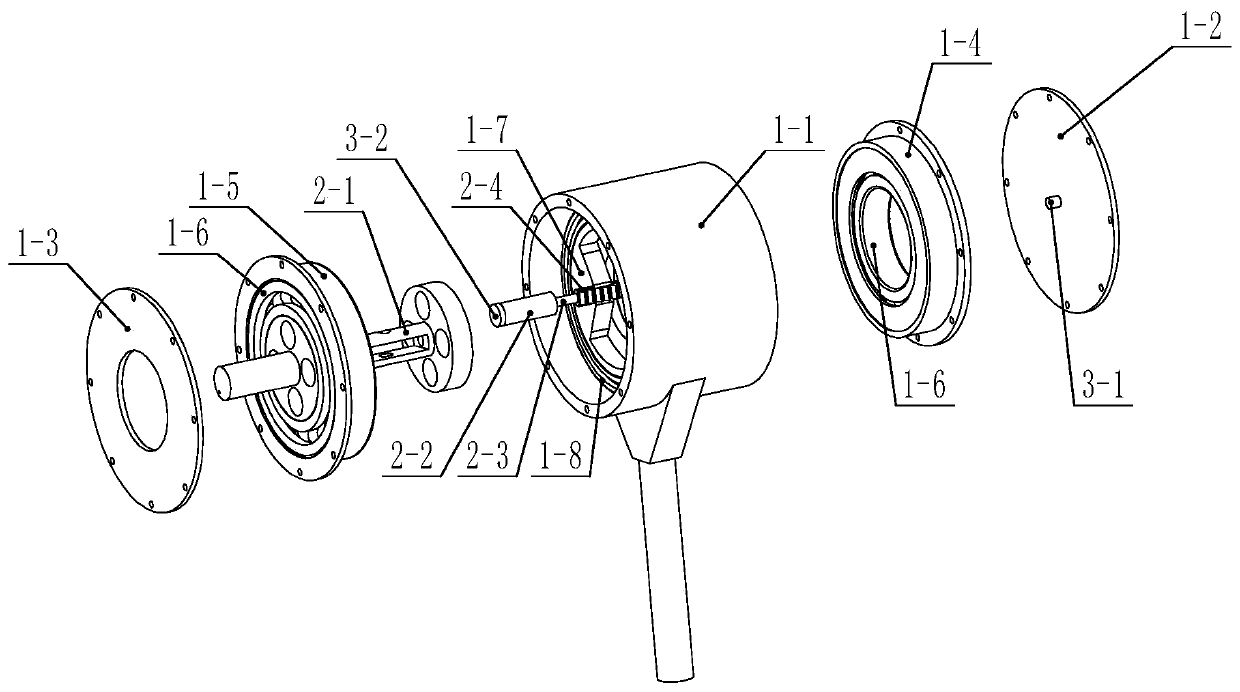
[0018] like Figure 1-4 As shown, a miniature high-torque high-speed joint integrated hydraulic driver includes a mechanical structure body 1, a transmission chain unit 2, a torque speed sensor 3-1, and a force and displacement sensor 3-2. The transmission chain unit 2 is located in the mechanical structure In the body 1, the mechanical structure body 1 includes an outer shell 1-1, a rear end cover 1-2, a front end cover 1-3, a rear support bearing sleeve cup 1-4, a front support bearing sleeve cup 1-5, two A support shaft bearing 1-6, two rack holders 1-7, two rack holder bearings 1-8, slip ring bearings 1-9, two support shaft bearings 1-6 are respectively assembled on the support shaft 2-1 Inside the rear support bearing sleeve cup 1-4 and the front support bearing sleeve cup 1-5 at both ends, the rear end cover 1-2 is attached to the end surface of the rear support bearing sleeve cup 1-4, and the front end cover 1-3 is pasted Closed on the end face of the front support bea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More