

Multi-objective robust control method for high-speed railway pantograph type current collector based on state estimation
A high-speed railway and state estimation technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems affecting the power supply of vehicle traction equipment, pantograph-catenary contact force fluctuations, and increasing the running speed of high-speed rail
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. like Figure 1-2 As shown, a high-speed railway pantograph multi-objective robust control method based on state estimation includes the following steps:
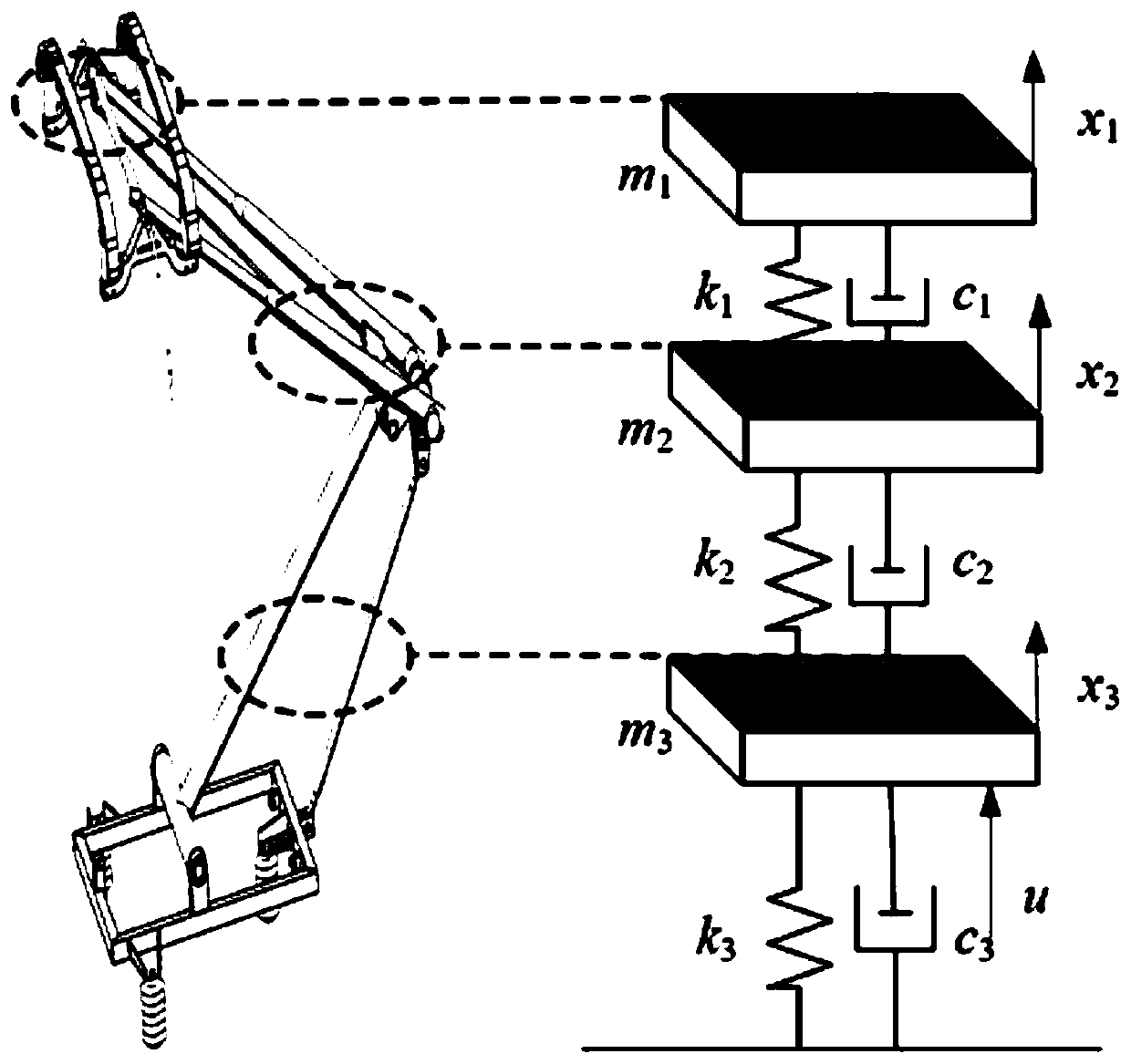
[0074] Step A: Construct a nonlinear pantograph-catenary model.
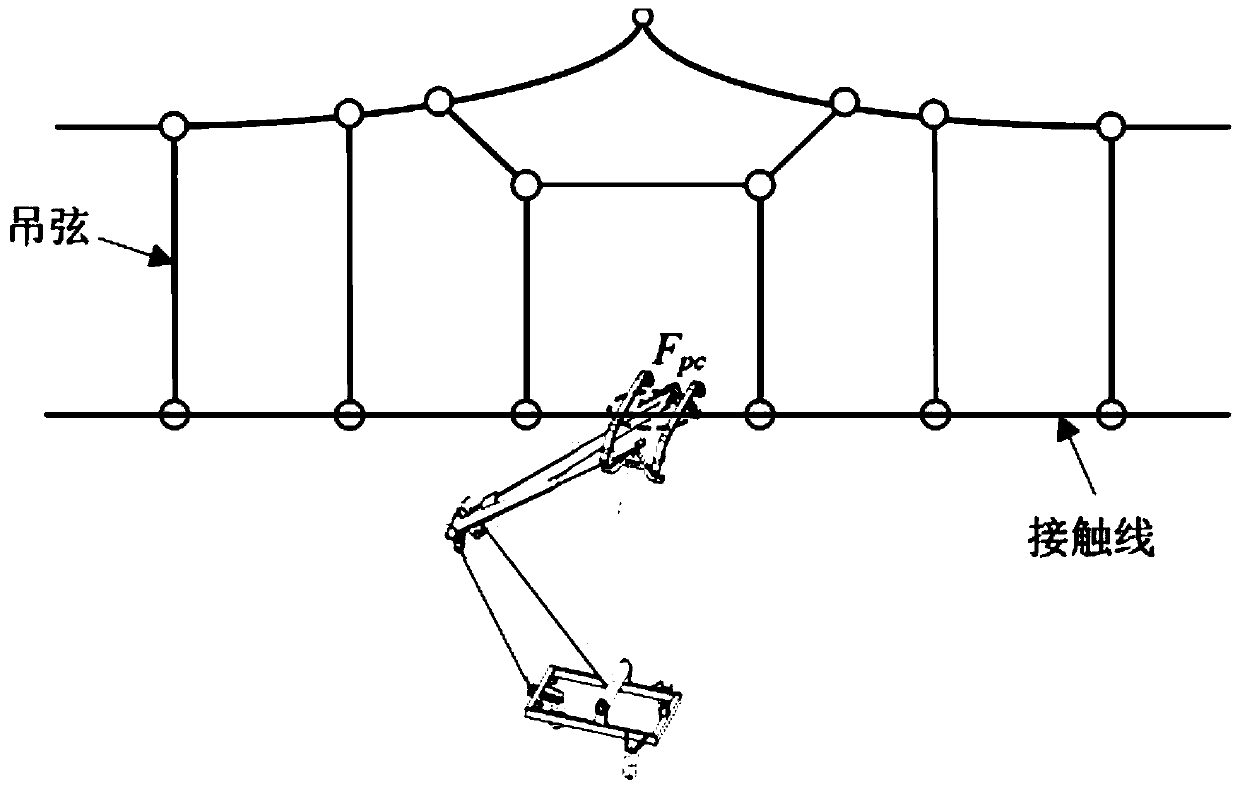
[0075] High-speed railways generally adopt the electric traction method, and the pantograph takes the current from the catenary. Therefore, the sliding contact state and dynamic coupling relationship between the pantograph and the catenary are the key factors affecting the energy acquisition of the train. In order to facilitate the formulation and effectiveness of the problem In the study, a nonlinear pantograph-catenary model was constructed first.
[0076] The dynamic equation of the pantograph is:
[0077]
[0078] Where: x 1 、x 2 and x 3 Respectively represent the displacement of the bow head, upper frame a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More