Multi-degree-of-freedom industrial robot
An industrial robot, a degree of freedom technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as unfavorable production operations, reduced operating efficiency and quality, and increased component loss, to improve work efficiency and quality. The effect of improving efficiency and quality, reducing the degree of loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
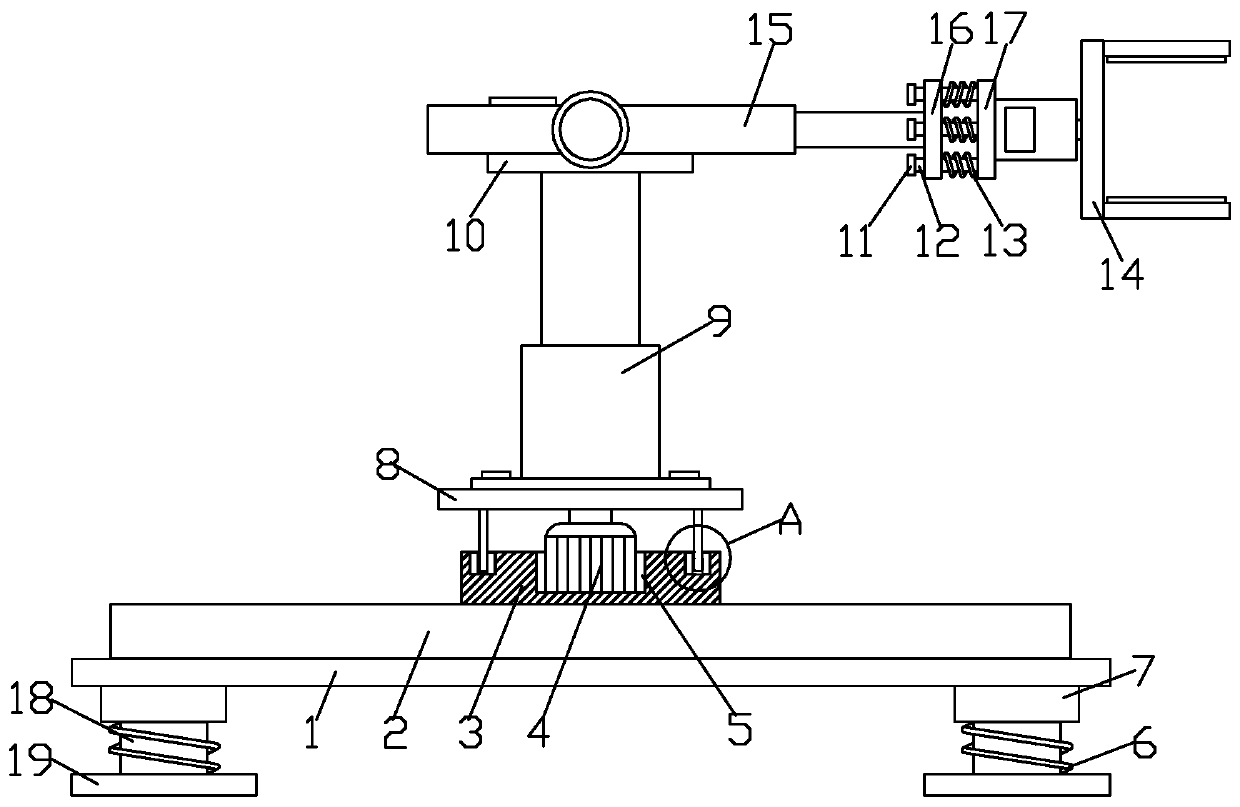
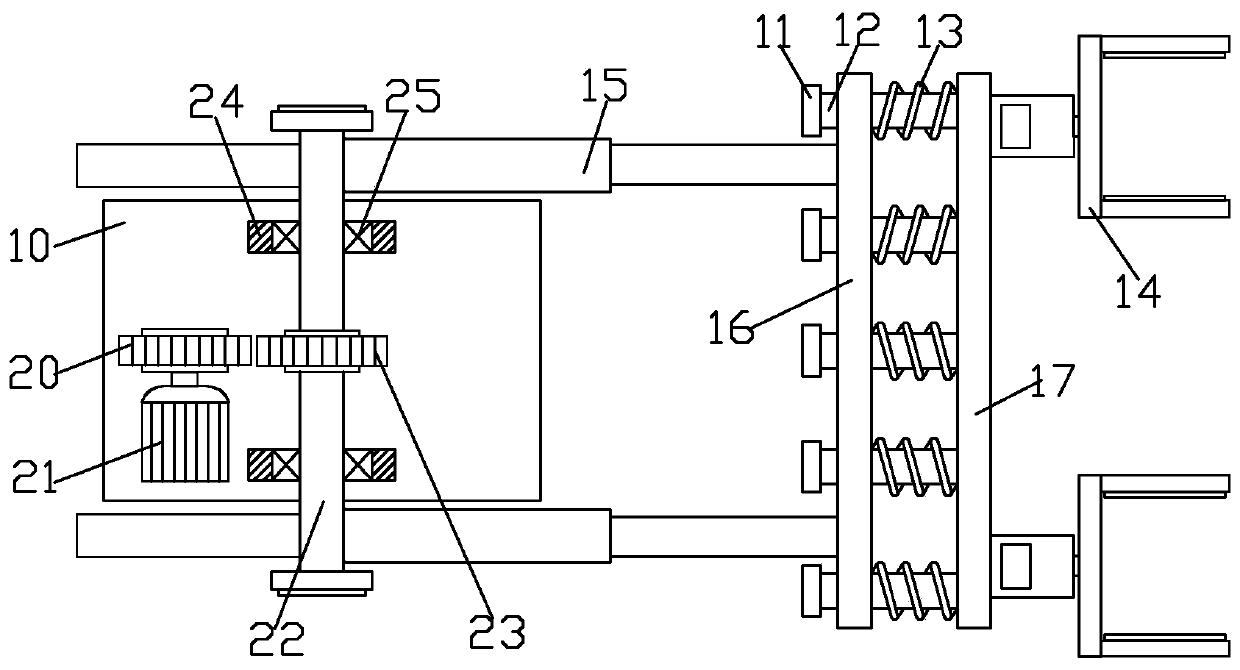
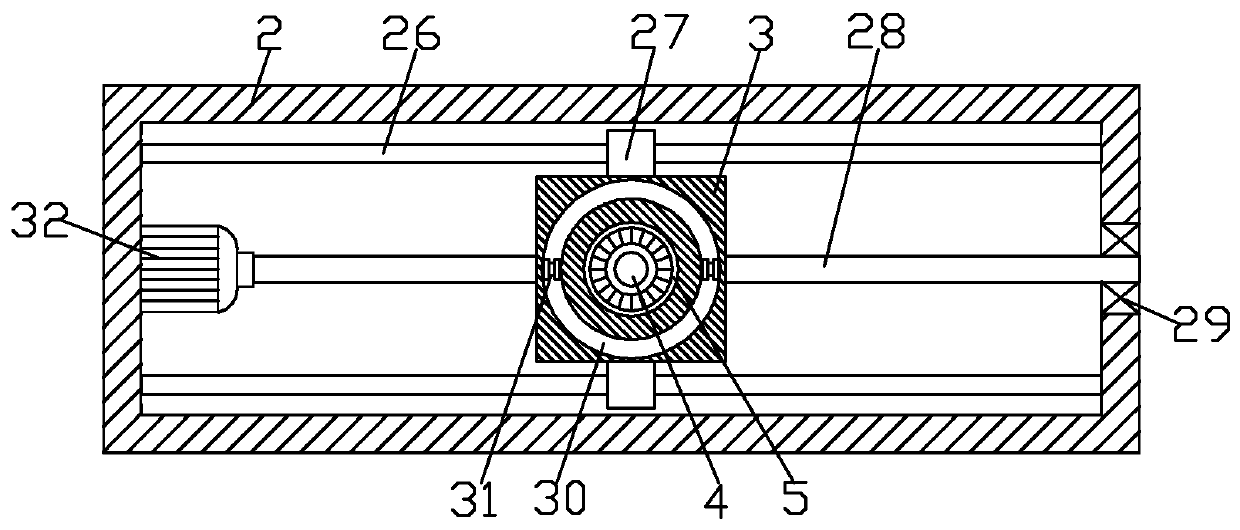
[0024] refer to Figure 1-5 , a multi-degree-of-freedom industrial robot, including a base plate 1, a shock absorbing mechanism is fixedly installed at the four corners of the lower bottom surface of the base plate 1, and the shock absorbing mechanism includes a sleeve 7 fixedly installed on a corner of the lower bottom surface of the base plate 1, and the sleeve 7 is inserted There is a sleeve rod 18, the upper end of the sleeve rod 18 is fixedly installed with a limit plate 33, and the limit plate 33 is located in the casing 7, the lower end of the sleeve rod 18 extends to the bottom of the sleeve pipe 7 and is fixedly installed with an anti-skid plate 19, and the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More