

Bipedal walking robot based on parallel mechanism
A walking robot and parallel technology, applied in the field of robotics, can solve problems such as small working space, complex kinematics solution, coupling position and direction of motion platform, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
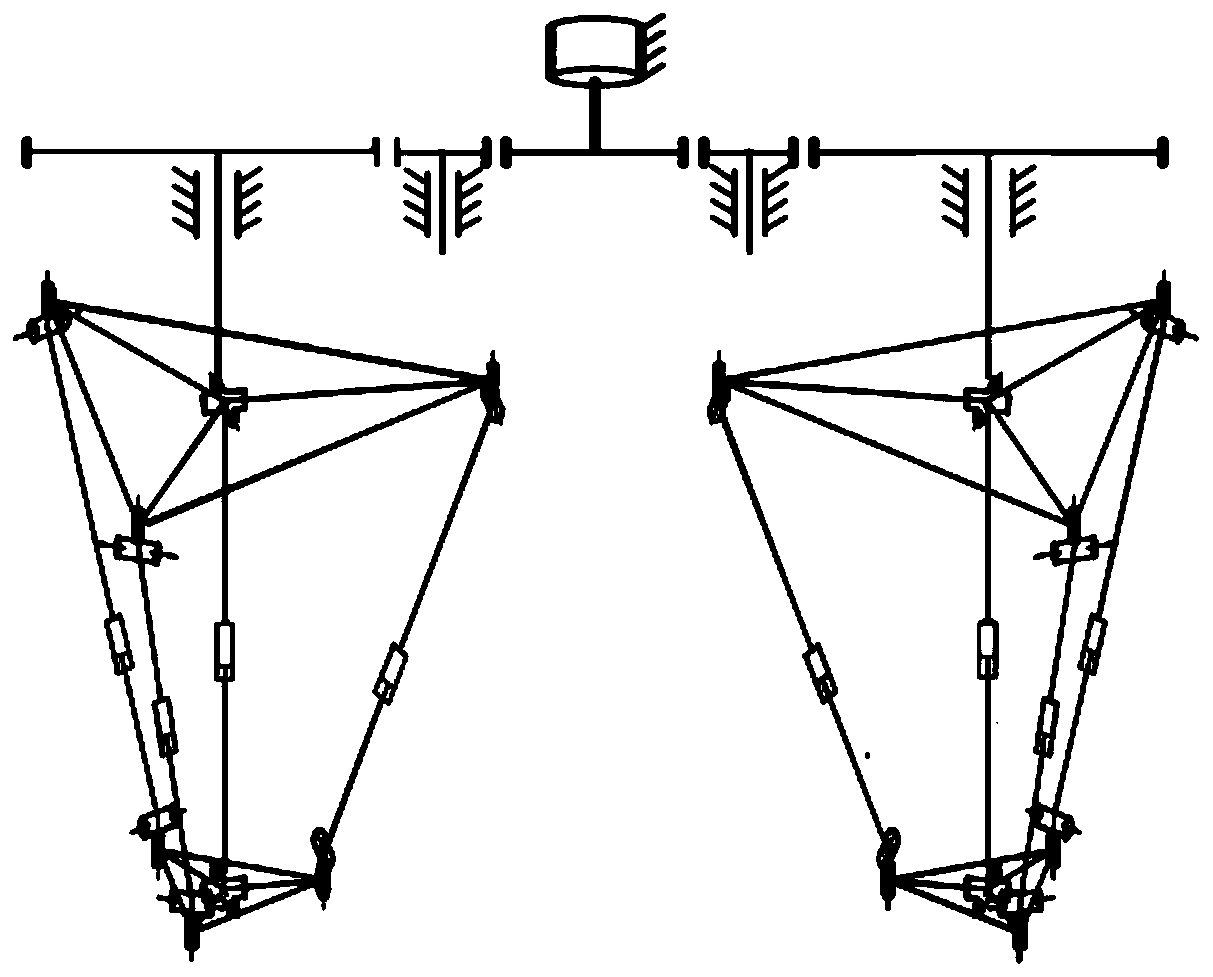
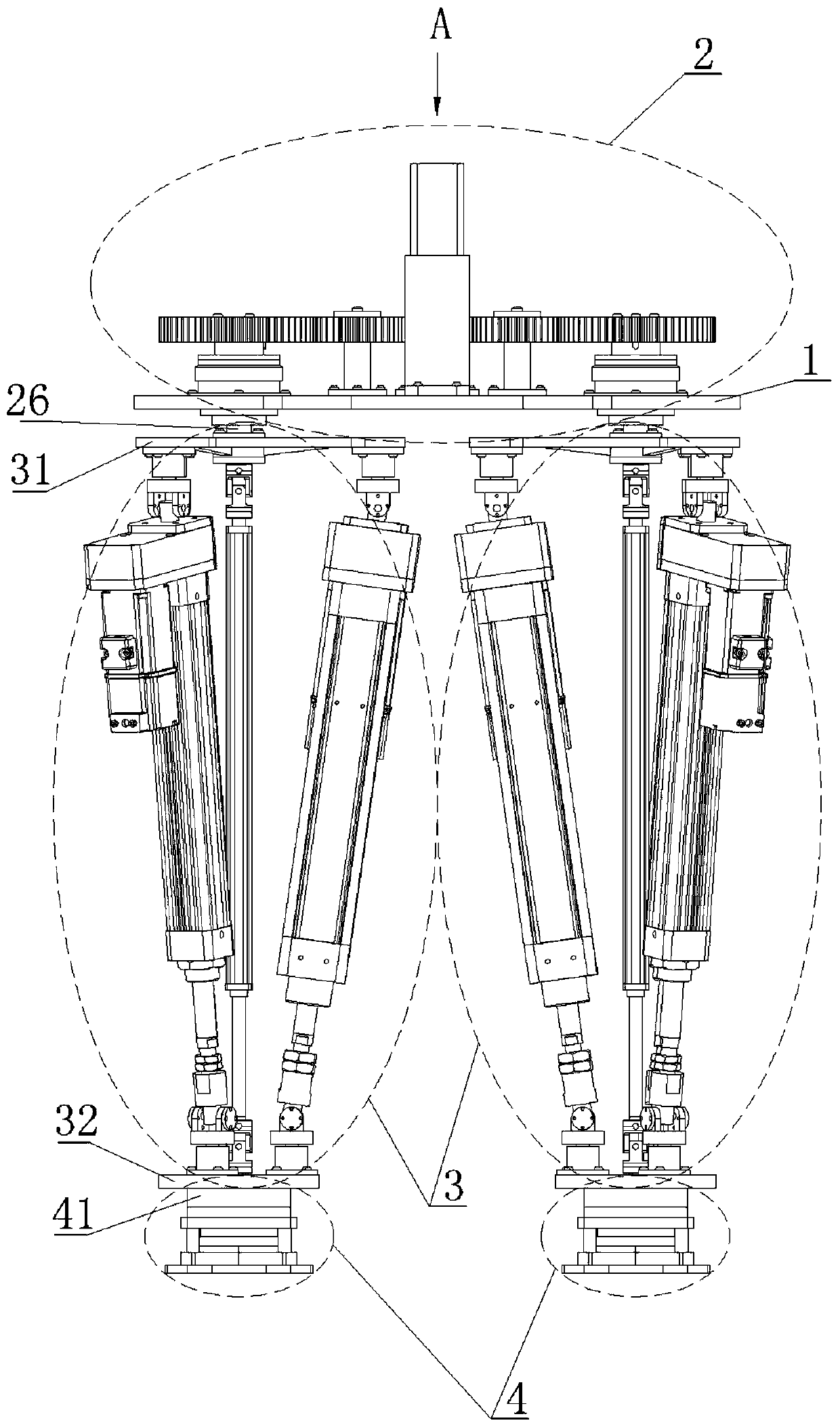
[0028] From figure 1 and figure 2 It can be seen that the bipedal walking robot based on the parallel mechanism of the present invention includes a waist platform 1, a steering mechanism 2, two three-degree-of-freedom leg mechanisms 3 and two sole mechanisms 4, and the steering mechanism 2 is installed on the waist platform. 1, the two leg mechanisms 3 are symmetrically arranged and connected to the lower side of the waist platform 1, and the two sole mechanisms 4 are connected to the bottom of the two leg mechanisms 3 one-to-one.
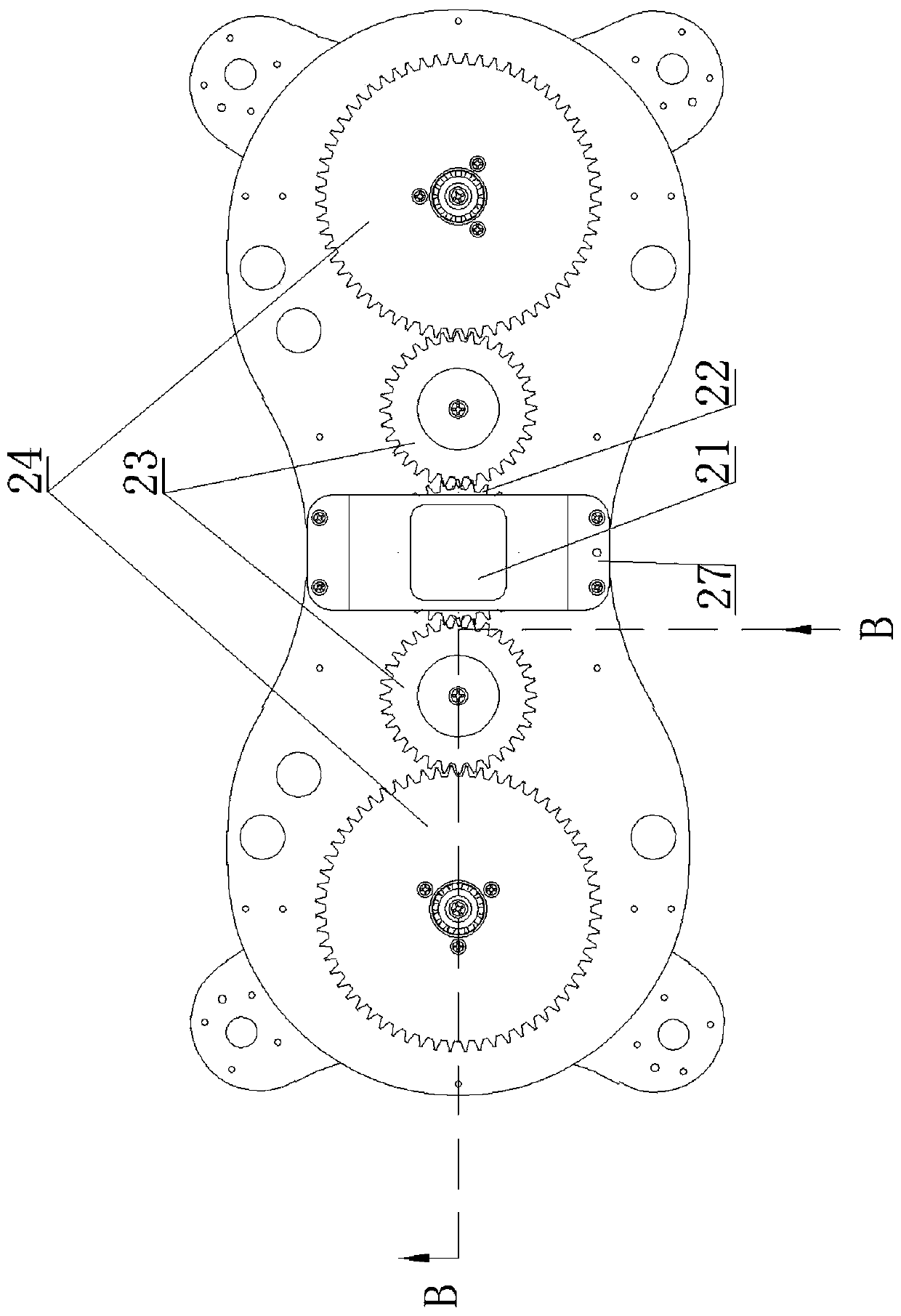
[0029] From Figure 2 to Figure 4 It can be seen that the steering mechanism 2 of the present invention includes a waist driving motor 21, a transmission mechanism, two electromagnetic clutches 25 and two transmission shafts 26, and the transmission mechanism is a gear transmission mechanism, which includes a driving gear 22, two transmission gears 23 and two driven gears 24, the electromagnetic clutch 25 includes an armature and a moving disc, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More