

Method for joint estimation of scene depth and semantics by single image
A joint estimation and single image technology, applied in the field of estimating the depth information and semantic information of the scene, can solve the problems of poor effect, large amount of calculation, expensive, etc., and achieve the effect of simple implementation and good scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The invention aims to realize the purpose of depth estimation and semantic segmentation estimation based only on color pictures. The present invention takes any device capable of collecting color pictures as a starting point, and obtains a depth map and a semantic map by using iterative network learning.
[0024] The present invention proposes a method for jointly estimating depth and semantic information through an iterative network, which is described in detail with reference to the drawings and embodiments as follows:
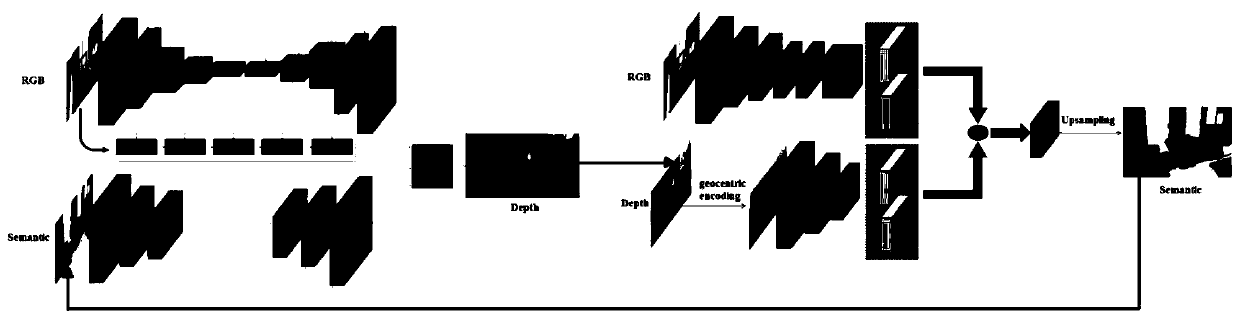
[0025] The present invention utilizes a color image obtained by a certain device and inputs it into a depth estimation and semantic segmentation iterative network for joint optimization to obtain a depth map and a semantic segmentation map corresponding to the image. Such as figure 1 As shown, it is the iterative network design proposed in the embodiment of the present invention. The iterative network is a multi-task deep convolutional network. It mainly i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More